
Press Releases


February 25, 2026
DOCOMO and Keio University Demonstrate World's First Stable, High-Fidelity Robot Teleoperation via Commercial 5G Using Low-Latency Slicing
TOKYO, JAPAN, February 25, 2026 --- NTT DOCOMO, INC. and Keio University Haptics Research Center announced today that they have successfully conducted a demonstration of high-precision remote robot operation over commercial 5G. By combining Configured Grant,*1 a low-latency network slicing technology,*2 with Keio's Real Haptics® technology,*3 delicate force feedback and tactile sensations were transmitted stably. This marks the world's first demonstration*4 of Configured Grant enabling practical robot teleoperation over commercial 5G.
In the experiment, Configured Grant was applied to the radio link between the terminal and base station to minimize latency and jitter. Results confirmed that latency requirements for practical teleoperation of Real Haptics robots were met, while force reproducibility and operability were improved.
To convey precise force feedback when a remote robot interacts with objects controlled by an operator at a distant location, mobile data communication must maintain low latency and minimal jitter. High or fluctuating latency can disrupt synchronization between the operator and remote robot. This compromises the precise force reproduction of Real Haptics, hindering delicate robot operation.
DOCOMO and Keio University have previously collaborated on the development and testing of Real Haptics for robot teleoperation over mobile networks.*5 By reducing the impact of latency in the wireless segment, highly precise and delicate remote robot control can now be performed stably even under network congestion.
Going forward, the two organizations will continue developing and testing technologies to accelerate the practical use of advanced robot teleoperation.
This demonstration will be exhibited at the NTT Group's booth during MWC Barcelona 2026, organized by GSMA and held in Barcelona, Spain, from March 2 to March 5, 2026.
- A scheduling method in which the base station pre-allocates communication resources to specific devices.
- A network slicing technology that provides virtualized network segments optimized for low latency.
- A technology invented by Professor Kohei Onishi (Keio University Haptics Research Center) that transmits tactile and contact information bidirectionally and reproduces human force on robots.
- As of February 25, 2026, according to DOCOMO's research.
- NTT DOCOMO, “Evolution of robotics with Force & Tactile Tele-Transmission“ (Japanese only)
Real Haptics® is a registered trademark of MotionLib Inc.
Appendix
Overview of the Demonstration
1. Background
Real Haptics® is a technology that reproduces the force sensation of touching objects on a robot. Using Real Haptics, a remote operator can perform delicate tasks by controlling a robot with precise force. By synchronizing the position, force, and speed between the operator robot (the “leader“) and the remote robot (the “follower“) in real time, the system conveys the sensation of touch to the operator and transfers subtle force to the target object.
Applying advanced robots like Real Haptics over mobile data networks enables outdoor operation and expands potential use cases. However, latency and jitters in mobile networks make stable robot teleoperation challenging. In Real Haptics, network delays can hinder force feedback, cause jerky movements, and reduce operational precision.
DOCOMO and Keio University have been exploring various approaches, developing and verifying technologies to reduce the impact of latency and jitters on wireless robot teleoperation. Previously, the two organizations demonstrated the effectiveness of combining network functions that stabilize latency with robot functions that mitigate its negative effects. For this demonstration, it focused on the wireless segment, which has a strong influence on mobile network latency, and introduced Configured Grant, a new approach that directly reduces latency and jitters.
2. Overview of Configured Grant
Configured Grant, a low-latency network slicing technique, assigns dedicated communication resources in advance to specific devices under a base station. This helps minimize latency and jitters in the wireless segment, regardless of network congestion.
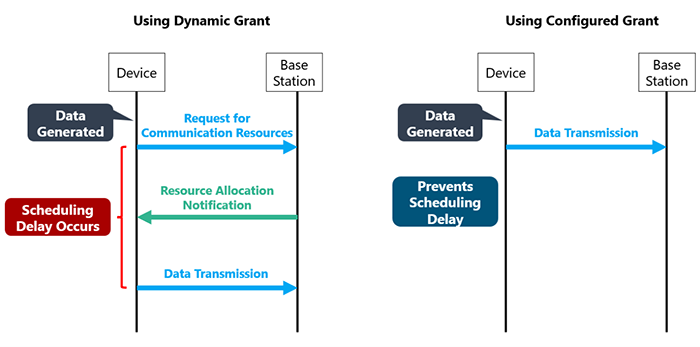
Normally, mobile devices communicate with a base station using the Dynamic Grant method (see Figure 1, left). When a device has data to transmit, it first requests communication resources from the base station. The base station then allocates resources based on the status of other devices and notifies the requesting device. The devices then use these resources to transmit the data. The time between the resource request and actual data transmission is known as scheduling delay. This delay always occurs under Dynamic Grant and can fluctuate depending on network conditions, posing a major challenge for stable remote operation of advanced robots, especially in congested networks.
On the other hand, with Configured Grant (see Figure 1, right), the base station pre-allocates exclusive communication resources to a device (or a line) for a specific period. The device can transmit data without requesting resources, effectively eliminating scheduling delay. As a result, both latency and jitters are reduced, enabling more stable wireless remote operation.

Configured Grant provides a stable mobile network with consistently low latency, ideal for precise teleoperation of advanced robots, regardless of network conditions.
3. Network Configuration and Experimental Method
The demonstration used DOCOMO's commercial 5G SA network, connecting the operator robot (Leader) and remote robot (Follower) via a virtual server on docomo MEC®*1 running the Bilateral Edge Platform™,*2 a proprietary platform currently under development for robot control (Figure 2). Control data packets sent from one robot travel through the uplink via DOCOMO's commercial network and docomo MEC private network to the server. The server then forwards these packets to the other robot over the downlink. Real-time bidirectional packet exchange enables force feedback of Real Haptics control. Furthermore, to simulate realistic teleoperation conditions where video transmission traffic would be present, 20 Mbps of background traffic was added alongside the control traffic.
Configured Grant was implemented at both the base stations and 5G devices. When communication occurs over a line assigned Configured Grant settings, the mechanism becomes active, enabling low-latency transmission.


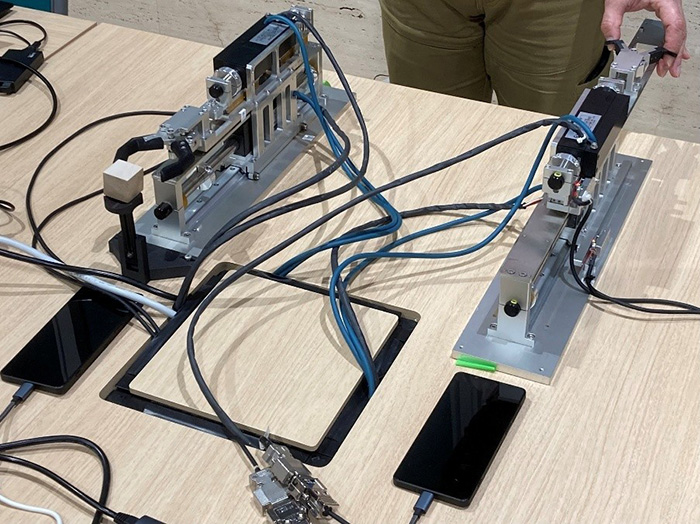
For the experiment, a hand-type follower and its leader were used to perform a standardized task: grasping a hard wooden block, quickly moving the hand while varying applied force, and transporting it within a set time. The task was performed twice, once using 5G SA with Configured Grant and once using standard 5G SA without it, to compare performance (Figure 3).

4. Results
Using 5G SA with Configured Grant, both the average communication latency and jitters (standard deviation) were lower compared to standard 5G SA without Configured Grant, meeting the latency requirements for practical teleoperation of Real Haptics robots. Furthermore, as latency characteristics improved, performance metrics for robot operation were also enhanced. The force-feedback reproduction rate*3 increased by 40% (24 points) with Configured Grant, providing more precise force feedback (Figure 4). The smoothness of robot operation, measured by Dimensionless Jerk Cost,*4 decreased by 59%, enabling smoother, more stable control (Figure 5).


- A cloud service providing Multi-access Edge Computing (MEC) features for the 5G era, including low latency and high security.
- A platform service that combines ultra-low-latency mobile data communication with remote control and AI operation of force- and touch-sensitive robots.
- A measurement of how accurately one robot replicates the force applied to the other robot. Values closer to 100% indicate higher fidelity.
- An indicator of motion smoothness based on acceleration changes. Lower values indicate smoother robot movements.
docomo MEC is a registered trademark of NTT DOCOMO, INC.
docomo MEC is provided by NTT DOCOMO, INC. and related services are consigned to and sold by NTT DOCOMO BUSINESS, INC. as the agent.
Bilateral Edge Platform is a trademark of NTT DOCOMO, INC.

