
Press Releases
November 1, 2022
Achieving 1-Mbps/300-m underwater transmission and wireless remotely operated vehicle (ROV) using underwater acoustic communication
— Progress towards the Extreme Coverage Extension that 6G-IOWN is aiming for —
The NTT Corporation (NTT; CEO, Akira Shimada), NTT DOCOMO, INC (DOCOMO; CEO, Motoyuki Ii), and NTT Communications Corporation (NTT Communications; CEO, Toru Maruoka) performed a joint experiment on achieving broadband wireless communication, and we succeeded at 1-Mbps/300-m underwater transmission in a shallow sea area (water depth of about 30 m) using underwater acoustic communication (*1) in field experiments.
These experiments demonstrated the world's first 1-Mbps wireless transmission over 300 m in a shallow sea area using spatio-temporal equalization technology (*2) for broadband transmission and improved resistance technology for environmental noise (*3). In addition, we developed a wireless remotely operated vehicle (ROV) using these technologies.
NTT and DOCOMO started considering applying these technologies to the Non-Terrestrial Network (NTN) (*4) for "5G Evolution & 6G powered by IOWN," and we have started study on extending coverage to underwater areas, which have been unexplored for high-speed wireless communication. In addition, NTT, DOCOMO, and NTT Communications are going to experiment in Shizuoka Prefecture in an underwater equipment inspection using this wireless ROV.
These technologies will be introduced at the "NTT R&D Forum - Road to IOWN 2022" (*5) scheduled to be held from November 16 to 18, 2022.
1. Background
There is demand for high-speed underwater wireless communication, which is one of the unexplored areas targeted by NTN technology. There are plans to realize "ultra-coverage extension" for "5G Evolution & 6G powered by IOWN" that combines the next-generation communication technology 6G with IOWN (*6) technology. Underwater wireless communication is divided into three types: low-frequency electromagnetic field communication that uses radio waves, optical wireless communication that uses light, and acoustic communication that uses sound waves. We focus on acoustic communication that allows for stable long distance transmission in shallow areas, and we have been working to further increase the distance and transmission rate, enabling high-definition underwater video transmission and wireless ROV, which will dramatically improve workability and efficiency in undersea resource development, underwater construction, and fisheries.
2. Introduction of technologies
2.1 Underwater acoustic communication
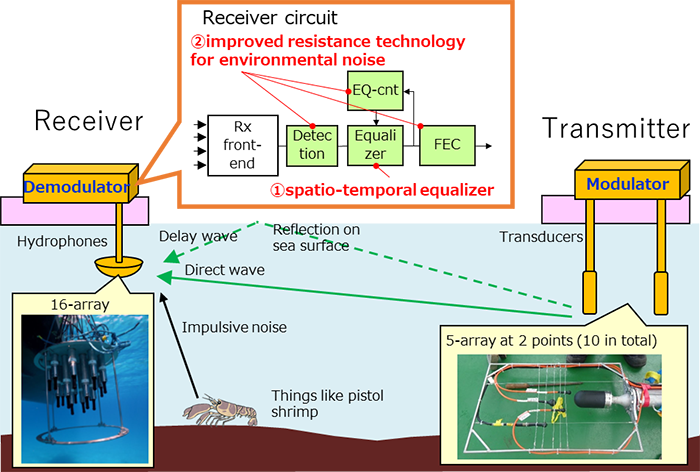
Fig. 1 shows a diagram of these field experiments. The transmitter has a transducer array with 5 different resonant frequencies (Right picture of Fig. 1) and an acoustic communication modulator. It transmits broadband modulation signals from 10 transducers in total. The receiver has a 16-hydrophone array (Left picture of Fig. 1) and an acoustic communication decoder. It demodulates received signals with the array.
We were successful at the world's first 1-Mbps wireless transmission over 300 m in a shallow sea area with a spatio-temporal equalizer to reduce the impact of delay spread and Doppler effect (*7) with a waving sea surface that are 200,000 times slower than land mobile communication and improved resistance technology for environmental noise to reduce the impact of impulsive noise (*8) from things like a pistol shrimp's impulse wave.
2.2 Positioning of our achievement
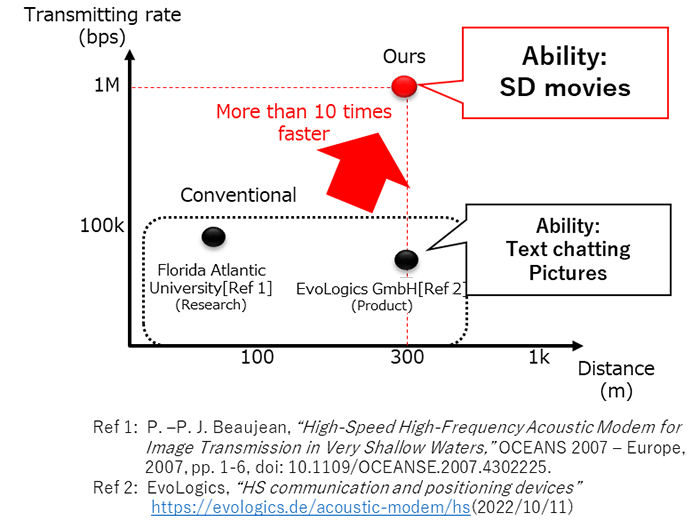
Fig. 2 shows the positioning of our achievement. In shallow sea areas, long-distance stable communication is difficult because of the impact of impulsive noise from things like a pistol shrimp's impulse wave. However, our technologies make 1-Mbps/300-m underwater transmission possible. They are more ten times faster than conventional technologies. This is equivalent to the transmission rate required for streaming movies at SD quality (H.264, 480p, 30 fps) and can be applied to real-time degradation diagnosis by transmitting images of underwater equipment and quay walls.
3. Wireless ROV
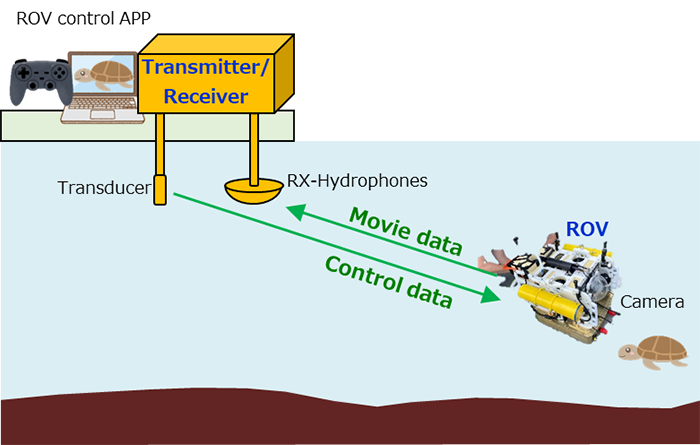
NTT developed a wireless ROV using these technologies. Fig. 3 shows the system for the ROV. The ROV can be controlled on a ship while checking real-time underwater video. The transmitter sends a control signal to the ROV. The ROV moves and shoots on the basis of this control signal and transmits streaming data to the acoustic demodulator on the ship. With this wireless control, the ROV can be operated remotely while real-time underwater video is checked, even in narrow areas with reefs and structures that are difficult to navigate with the conventional tether cable ROV. It is possible to improve the workability and efficiency of underwater facility inspections using underwater drones.
In addition, NTT, DOCOMO, and NTT Communications are going to perform experiments for the "Shizuoka Marine Trial Field Center" (*9) promoted by Shizuoka Prefecture through an underwater equipment inspection using this wireless ROV. The role of each company is as follows:
[Role]
| NTT | Realize wireless ROV with underwater acoustic communication and operate ROV in field experiments. |
|---|---|
| DOCOMO | Investigate applicability of undersea acoustic communication with NTN technology of "5G Evolution & 6G powered by IOWN." |
| NTT Communications | Environmental preparation for experiment implementation in the demonstration field. Evaluation of serviceability with a view to commercialization of undersea wireless communications. |
4. Upcoming
The ROV is expected to be deployed in areas where the conventional tether cable ROV already operates, leading to further expansion of the ROV market. Today, the market for ROV in Japan and overseas is increasing by about 10% annually, but this achievement is expected to further expand the market. NTT Communications is going to work toward practical application in the field of fisheries (for example, marine environment surveys in the aquaculture industry)and to expand the use of underwater drones in other fields such as port facility inspections and the entertainment industry such as diving.

