

3GPP Release 18標準化活動(1)
3GPP Release 18における産業創出・ソリューション協創向け高度化技術
Vertical Network IoT NTN
吉岡 翔平(よしおか しょうへい) 岡野 真由子(おかの まゆこ)
6Gネットワークイノベーション部
閔 天楊(びん てんよう)
RAN技術推進室
岡村 真哉(おかむら まさや) 島 康介(しま こうすけ)
デバイステック開発部
あらまし
3GPPでは,Rel-16/17において幅広いユースケースおよび高度なソリューションをターゲットとする仕様化が行われたが,Rel-18においてもさらに新たな産業の創出や社会課題の解決をめざした仕様化が行われた.本稿では,3GPP Rel-18における産業創出・ソリューション協創に資する無線アクセス仕様を解説する.
01. まえがき
-
3GPP(3rd Generation Partnership Project)では,産業連携をターゲットとした ...
開く

3GPP(3rd Generation Partnership Project)では,産業連携をターゲットとした第5世代移動通信システム(5G)の技術検討が,Release 17(以下,Rel-17)までに進められてきた.従来の移動通信サービスを対象とした無線技術に限らず,例えばスマートファクトリー*1,コネクテッドカー*2,センサネットワークなどのIoT(Internet of Things)や,空中・海上・山間部などの新カバレッジにおけるユースケースといった,さまざまな産業や社会を支え,あるいは新たな価値を提供するサービスの実現をめざした無線技術が仕様化されている.Rel-18においては,産業連携領域のさらなる拡大と,Rel-17までにターゲットとした,産業連携領域におけるソリューションのさらなる高度化をめざした技術の仕様化が行われた.
本稿では,産業連携を主なターゲットとした各種ソリューション(以下,産業連携ソリューション)について,3GPP Rel-18の検討背景および実現のための,無線関連の要素技術を解説する.
- スマートファクトリー:高信頼・低遅延な無線ネットワークを通じてエリア内のあらゆる機器が相互に接続して自動制御などを行う工場システム.
- コネクテッドカー:通信機器を介して外部との通信が可能な車.
02. 産業連携ソリューションの検討背景
-
3GPP Rel-18に関連する産業連携ソリューションとその背景,および技術要件について ...
開く
3GPP Rel-18に関連する産業連携ソリューションとその背景,および技術要件についてまとめる.
2.1 IoT
これまで3GPP Rel-16およびRel-17では,V2X(Vehicle to everything)*3やIIoT(Industrial IoT)*4向けの高信頼・低遅延通信技術(URLLC:Ultra-Reliable and Low Latency Communications)*5,端末測位技術などハイエンドなIoTサービスに加え,RedCap(Reduced Capability)*6[1]と呼ばれるウェアラブルデバイスなどのミドルレンジIoTサービスもターゲットとした無線技術の高度化・最適化が行われてきた.以下に述べるとおりRel-18では,これらIoTサービスのさらなる適用領域拡大をめざし技術検討が行われた.
(1)eRedCap(enhanced RedCap)
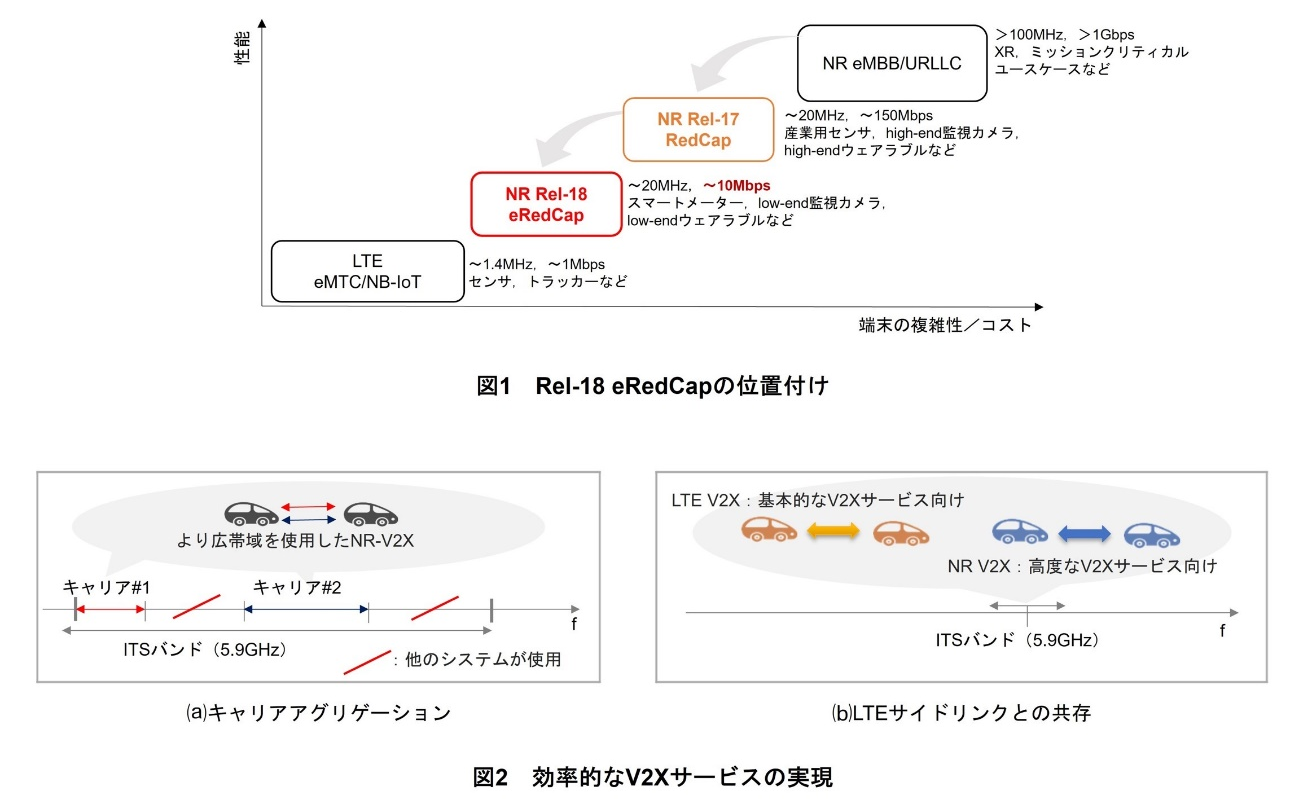
Rel-17において,NR(New Radio)*7のモバイルブロードバンド高度化技術(eMBB:enhanced Mobile BroadBand)*8やURLLCといった機能をサポートするハイエンドなIoT端末と,LTE-IoTが提供するeMTC(enhanced Machine Type Communication)*9やNB-IoT(Narrow Band-IoT)*10におけるローエンドなIoT端末との間の端末複雑度・性能をもつRedCap端末の仕様最適化が行われた.一方,RedCapとLTE-IoTとの間にも,スマートグリッド*11といった新たなユースケースが考えられ,図1に示すとおり,Rel-18ではRedCapからさらに端末の複雑性を削減するためのeRedCapの仕様化が行われた.
(2)UAV(Unmanned Aerial Vehicle)
また,近年さまざまなビジネス分野においてセルラーネットワークに接続するドローンを活用した新たなサービスが提供され始めている.国内では2022年12月に改正航空法が施行されるとともにドローンレベル4飛行*12が解禁され,ドローンの利用シーンが増え続けている.ドローンでの高速・大容量通信のニーズが高まる中で,Rel-18ではドローン端末(UAV)向けの最適化が行われた.LTE UAVの基本機能を踏襲しつつ,より高度な機能拡張も行われた.
(3)サイドリンク
また,IoTを対象とした産業連携ソリューションの実現のために期待されている機能の1つとしてサイドリンク*13がある.5Gにおけるサイドリンク規格として,3GPPはこれまでRel-16においてV2X向けにサイドリンクの基本機能を仕様化し[2],Rel-17においてV2Xにおける歩行者端末や,Public safety向け端末などを対象に,消費電力低減機能および高信頼・低遅延向け機能の追加を行った.一方で,サイドリンクを用いたIoTネットワークは実現に向けた課題も多く,世界で幅広く実用化されるには至っていない.従って,その実用化に向けて,Rel-18においてサイドリンクのさらなる機能拡張が行われた.具体的には,データレート向上や適用領域の拡大を目的として5~6GHz帯のアンライセンスバンド*14向け機能を追加し,効率的なV2Xサービスの実現を目的としてサイドリンクのキャリアアグリゲーション*15機能および,NRサイドリンクとLTEサイドリンクの共存機能を追加した.キャリアアグリゲーション機能については,図2(a)に示すようにITS(Intelligent Transportation System)*16バンド内においてセルラV2Xに割当て可能な周波数帯域が,複数の非連続な帯域であるケースを対象としている.NRサイドリンクとLTEサイドリンクの共存機能については,図2(b)に示すように限られた帯域幅であるITSバンドがセルラV2X向けに割り当てられ,すでにLTEサイドリンクが実用化されている国や地域において,同じITSバンド内でNRサイドリンクを効率的に利用できるようにすることを目的としている.
(4)端末位置測位技術
IoTサービスの実現に向けて,無線通信を用いた端末位置測定も重要な機能の1つである.NRでの端末位置測位技術は,Rel-16でTiming・Angleベースの測位方式が仕様化され,その後,Rel-17で主に高精度化と測位遅延低減の2方面で機能拡張が行われた.Rel-18では,さらなる機能拡張としてGNSS(Global Navigation Satellite System)*17が苦手とする,スマートファクトリーなど屋内のユースケースに対して,センチメートル級をターゲットとしたさらなる測位精度向上などが行われた.また,これまで産業連携向けの仕様化が進められてきたことを背景に,近年ではNRがスマートフォン以外の多種多様なデバイスへの広がりを見せている.これらの端末に特化した位置測位機能が仕様化され,具体的には,RedCap端末での位置測位高度化,サイドリンクでの位置測位機能の導入,位置測位時の端末消費電力の削減がそれぞれ行われた.
2.2 スマートファクトリー
スマートファクトリーで5Gを利用してロボットやセンサを制御するためには高精度時刻同期が不可欠であり,Rel-16では端末と基地局との間で高精度な時刻を通知する機能が仕様化された.Rel-17では,セルサイズが大きい場合に端末と基地局との間の伝搬遅延が同期精度に影響が出ることを考慮し,時刻同期手順に伝搬遅延を補償する機能が導入された.一方で,5Gの無線通信を用いたスマートファクトリーの実現には課題も残されている.Rel-18では基地局側のクロック品質に起因して高精度時刻同期の精度が一時的に劣化することを考慮し,時刻同期のステータスをモニターする機能が仕様化された.
2.3 空中・海上・山間部などの新カバレッジ
Rel-17において,非地上ネットワーク(NTN:Non-Terrestrial Network)*18向けの仕様が策定された[1].3GPP NTN仕様によって,5Gネットワークを空中・海上・山間部などあらゆる場所へ低コストで拡張することができ,多様な産業連携ソリューションの実現が見込まれている.一方で,Rel-17のNTN仕様は,通信に必要不可欠と考えられる最低限の機能に留まっており,実環境で利用可能な端末種別や周波数帯も限られていた.そこでRel-18では,NTNの効率化・実用化および適用領域の拡張を実現する機能が議論され,仕様化された.
(1)NTNの効率化・実用化
NTNの効率化・実用化を実現する機能として仕様化されたのは,以下の3つの拡張機能である.
- 1つ目は上りリンク(UL:UpLink)のカバレッジ改善機能である.NTNでは端末と衛星の間の伝搬距離が大きいことから,スマートフォンなどアンテナゲインの小さい端末の電波が届きにくい問題がある.特に端末から見た衛星の仰角が小さい場合に,この問題が顕著になる.そこで,高度1,200kmの低軌道(LEO:Low Earth Orbit)衛星が端末から見て仰角30度に位置する場合を想定し,このとき必要な通信品質を満たしていない特定のULチャネルについて,繰返し送信などの通信品質の改善機能が仕様化された.
- 2つ目は端末位置の妥当性検証機能である.端末は例えばGNSS信号に基づいて測定した自身の位置をネットワークに報告できるものの,その情報が噓偽りのない情報か否かが定かでないという問題がある.特定のサービス,例えば緊急通報や警報システムなどにおいては,各端末の位置が10km程度の粒度で正しいかの検証を要求する法規制が存在し,特にセル半径が大きいNTNではこの問題に対処する必要がある.そこでNTNと端末との間で送受信される位置測位用の信号に基づいた端末位置の確認機能が仕様化された.
- 3つ目はNTN-TN間およびNTN-NTN間モビリティの拡張機能である.NTN-TN間のRRC_IDLE*19状態のモビリティにおいて,NTN端末は海などTNカバレッジがないエリアでTN周波数測定をし続けると,不要な測定により電力を無駄に消費してしまう問題がある.TN周波数の測定を実行しないようにすることでこの問題は解決できるが,一方で端末が陸地など,TNカバレッジがあるエリアに移動した際には,TN周波数測定を再開することが望ましい.そこでNTN cellにおいてTNの物理カバレッジを報知する機能が導入された.これによりNTN cellにおける端末は,TN物理カバレッジのあるエリアのみでTN周波数測定をすることが可能になる.また,NTN-NTN間のモビリティについては,earth moving cell*20においてcell内の多数の端末が一斉ハンドオーバ*21するタイミングが存在し,その際のランダムアクセス*22による上り送信オーバーヘッドを削減するために,RACH(Random Access CHannel)*23-less ハンドオーバが仕様化された.
(2)NTNの適用領域の拡大
NTNの適用領域の拡張を実現する機能としては,VSAT(Very Small Aperture Terminal)端末*24向けの周波数帯を対象とした仕様が定められた.衛星通信において広く用いられている周波数帯,すなわち下りリンク(DL:DownLink)17.3~20.2GHz,UL27.5~30.0GHzは従来の5G仕様では想定されていない周波数帯であったため,これらをFR(Frequency Range)2*25-NTNと定義して,FR2向けの仕様を適用するものとしている.
- V2X:車車間の直接通信(V2V:Vehicle to Vehicle),車と路側機(道路脇に設置されている無線通信設備)間の直接通信(V2I:Vehicle to Infrastructure),車両と歩行者間の直接通信(V2P:Vehicle to Pedestrian),LTEや5Gなどのセルラ網を経由して通信する広域通信(基地局経由通信,V2N:Vehicle to Network)の総称.
- IIoT:工場などにおける機器のネットワーク接続など,産業分野向けのIoT.
- 高信頼・低遅延通信技術(URLLC):低遅延かつ,高信頼性を必要とする通信の総称.
- RedCap:Rel-17 NRにおいて導入された簡易端末カテゴリの名称で,通常のNR端末よりサポートする送受信アンテナ数や帯域幅を減らすことでデバイスの複雑さを低減する.
- NR:5G向けに策定された無線方式規格.4Gと比較して高い周波数帯(例えば,3.7GHz帯や4.5GHz帯,28GHz帯)などを活用した通信の高速・大容量化や,高度化されたIoTの実現を目的とした低遅延・高信頼な通信を可能にする.
- モバイルブロードバンド高度化技術(eMBB):高速大容量を必要とする移動体通信の総称.
- eMTC:狭い周波数帯域により低速データ通信を行うセンサなどのローエンドIoT端末のためのLTE仕様.
- NB-IoT:eMTCよりもさらに狭い周波数帯により超低速データ通信を行うセンサなどのローエンドIoT端末のためのLTE仕様.
- スマートグリッド:電力システムに無線センサを組み込み,供給側と需要側の電力をリアルタイムかつ自律的に監視・制御し,最適化できる送電網.
- ドローンレベル4飛行:ドローンの飛行方法・範囲の1つであり,有人地帯での補助者なし目視外飛行を指す.
- サイドリンク:端末 - 端末間通信(Device-to-Device)の別称.
- アンライセンスバンド:行政による免許割当てが不要で,特定の通信事業者に限定されずに使用可能な周波数帯.
- キャリアアグリゲーション:複数のコンポーネントキャリアを用いて同時に送受信することで,広帯域化を実現する技術.
- ITS:通信技術を用いて,車両管理や道路交通などを快適にする交通システム全体の総称.
- GNSS:GPSや準天頂衛星などの衛星測位システムの総称.
- 非地上ネットワーク(NTN):衛星やHAPSなどの非陸上系媒体を利用して,通信エリアが地上に限定されず,空・海・宇宙などのあらゆる場所に拡張されたネットワーク.
- RRC_IDLE:端末のRRC状態の1つであり,端末は基地局内のセルレベルの識別をもたず,基地局において端末のコンテキストが保持されていない.コアネットワークにおいて端末のコンテキストが保持されている.
- earth moving cell:NTNにおけるセルのうち,地表に対して移動するセルを指す.
- ハンドオーバ:通信中の移動端末が移動に伴い基地局をまたがる際,通信を継続させながら基地局を切り替える技術.
- ランダムアクセス:端末が基地局と上り同期を確立,上り送信リソースを基地局から受信するために行われる最初のアクセス手順.
- RACH:上り方向の共通チャネルで,制御情報およびユーザデータの送信に使用するチャネル.各ユーザが独立に信号をランダムに送信することにより,1つのチャネルを複数ユーザで共通に使用する.
- VSAT端末:小型のパラボラアンテナなどを使用して飛行体と通信を行う装置.スマートフォンと比較すると大型であり,当該装置の先に有線でハブ・固定電話・PCなどを接続する構成が想定される.
- FR2:24,250~52,600MHzの周波数帯を指す.
03. 産業連携ソリューションを実現する要素技術
-
前述した検討背景に基づき,産業連携ソリューションの実現に向けて, ...
開く
前述した検討背景に基づき,産業連携ソリューションの実現に向けて,Rel-18では以下の無線技術の検討および仕様化が行われた.
3.1 RedCap
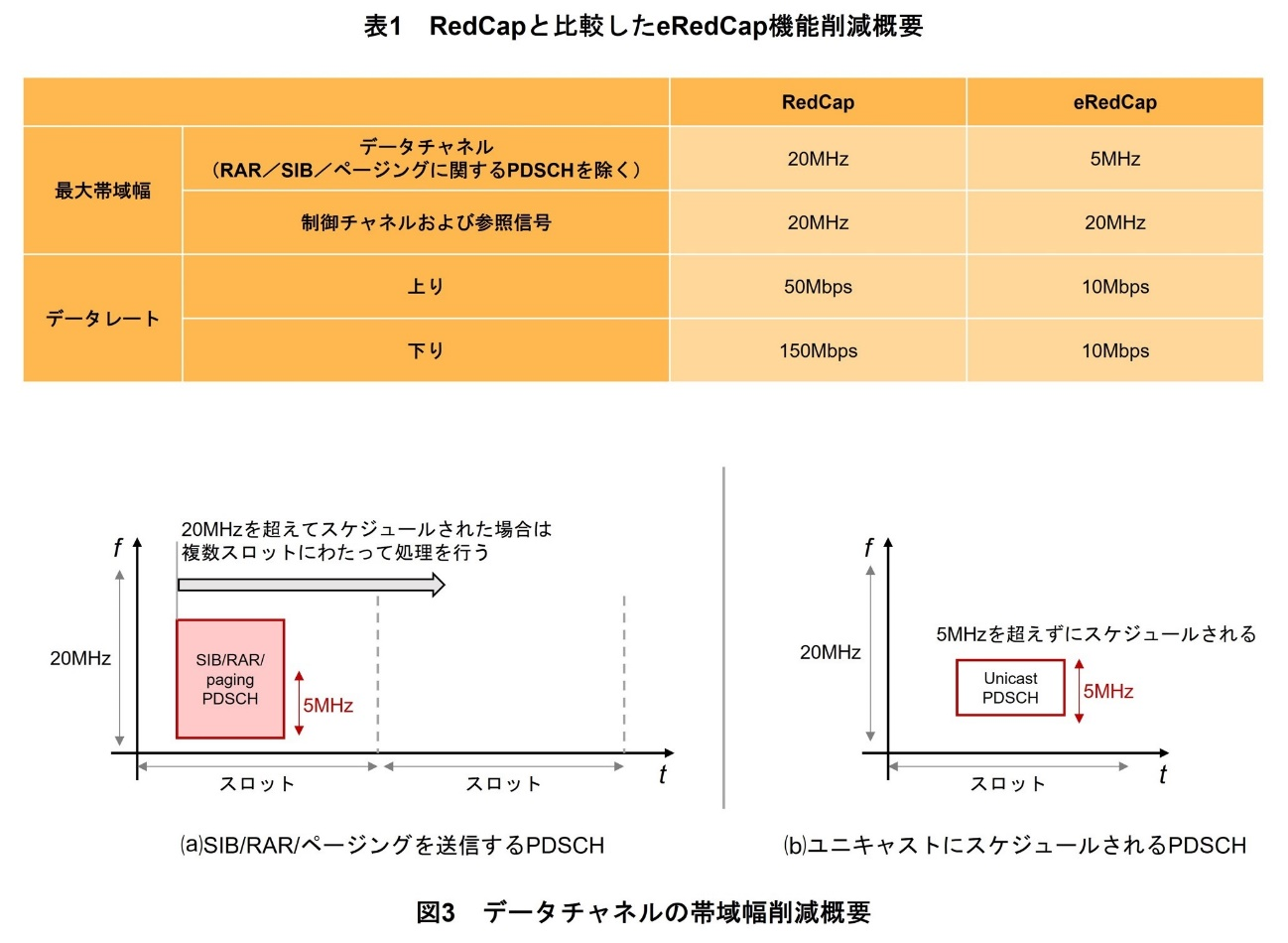
Rel-18では,NRが提供するミドルレンジIoT端末RedCapとLTE-IoTが提供するeMTC/NB-IoTとの間を補完する,eRedCap端末のための無線技術が仕様化された.RedCapと比較したeRedCap機能削減概要を表1に示す.なお,eRedCap端末はFR1*26を運用周波数帯として想定するが,以下に述べる機能削減を除きRedCap端末と同じ機能をサポートする.また,RedCap/eRedCap端末向けに端末位置測位機能の最適化も行われた.
(1)データチャネル*27の帯域削減
RedCap端末は最大20MHzでデータチャネルを送受信可能であることに対し,eRedCap端末ではデータチャネルの最大帯域幅が5MHzに削減される.ここで,5MHzは端末が1スロット*28当りに処理可能なデータチャネルのベースバンド*29帯域幅であり,RF(Radio Frequency)*30の帯域幅としてはeRedCap端末もRedCap端末同様最大20MHzをサポートする.そのため,特に非RedCap端末やRedCap端末と同じセルで運用されるシナリオにおいて,SIB(System Information Block)*31,RAR(Random Access Response)*32,ページング*33を送信するPDSCH(Physical Downlink Shared CHannel)*34といった,非RedCapやRedCap端末と共有する一部データチャネルについては5MHzを超えてスケジュールされ得ることが想定される(図3(a)).一方,端末に対してユニキャストにスケジュールされるPDSCHについては,HARQ-ACK(Hybrid Automatic Repeat reQuest-ACKnowledgement)*35フィードバックにかかる処理時間を考慮し,5MHzを超えずにスケジュールすることが規定されている(図3(b)).なお,当該ベースバンド帯域削減はデータチャネルにのみ適用されるため,同期信号*36,報知チャネル*37,制御チャネル,その他参照信号*38についてはRedCap端末同様,最大20MHzの帯域幅で送受信することができる.3GPPでの検討結果[3]では,当該帯域削減により,RedCap端末と比較し最大9.2%の端末コスト・複雑性削減効果が見込まれることが示された.
(2)ピークデータレート削減
RedCap端末は下り150Mbps,上り50Mbpsのデータレートをターゲットとしていることに対し,eRedCap端末のピークデータレートは上下共に10Mbpsに削減される.具体的には,非RedCap端末やRedCap端末に対しては,ピークデータレート計算に用いられるMIMO(Multiple Input Multiple Output)*39のレイヤ数,変調多値数*40,スケーリングファクター*41の積を4以上とすることが規定されていたが,eRedCap端末に対してはこれらの積を0.75,0.8または3.2のいずれかの値とするよう緩和された.3GPPでの検討結果[3]では,当該ピークデータレート削減により,RedCap端末と比較し最大5.4%の端末コスト・複雑性削減効果が見込まれることが示された.
また,上記に加え,ネットワーク観点でeRedCap端末を,非RedCap端末やRedCap端末と区別するために初期アクセス中にeRedCap端末であることをネットワークへ報告する機能や,eRedCap端末に特定のセルへのアクセス制限を通知する機能も仕様化された.
さらに,端末消費電力のさらなる削減をめざし,待受け状態(RRC_INACTIVE*42状態)におけるeDRX(extended Discontinuous Reception)*43について,Rel-17でRRC_INACTIVE状態に対して規定された最大DRX*44周期10.24秒から,Rel-17でRRC_IDLE状態に対して規定された最大周期と同じである10,485.76秒に拡張された.
(3)RedCap/eRedCap端末での測位精度向上
測位専用参照信号であるPRS(Positioning Reference Signal)*45は,利用可能な全帯域幅において複数シンボル*46にわたって送信され,合成受信*47により時間分解能*48を向上させることで,Timingベース測位による高精度測位が実現されている.Rel-17で仕様化されたRedCap端末や,Rel-18で仕様化されたeRedCap端末においてもRel-16/17で仕様化されたPRSを用いた測位技術は利用可能である.しかしながら,通常端末による,PRSを測定可能な最大帯域幅は,FR1で100MHz,FR2で400MHzなのに対し,RedCap端末やeRedCap端末による,PRSを測定可能な最大帯域幅は,FR1で20MHz,FR2で100MHzに削減されているため得られる時間分解能に制限があり,Timingベース測位時に測位精度が劣化してしまう課題があった.例えば必要な測位精度として,一般商用環境において水平測位精度3m,垂直測位精度3m,工場などの産業用途において水平精度1m,垂直精度3mが想定されるが,上記の課題により,既存の測位技術ではこれを達成することは難しかった.
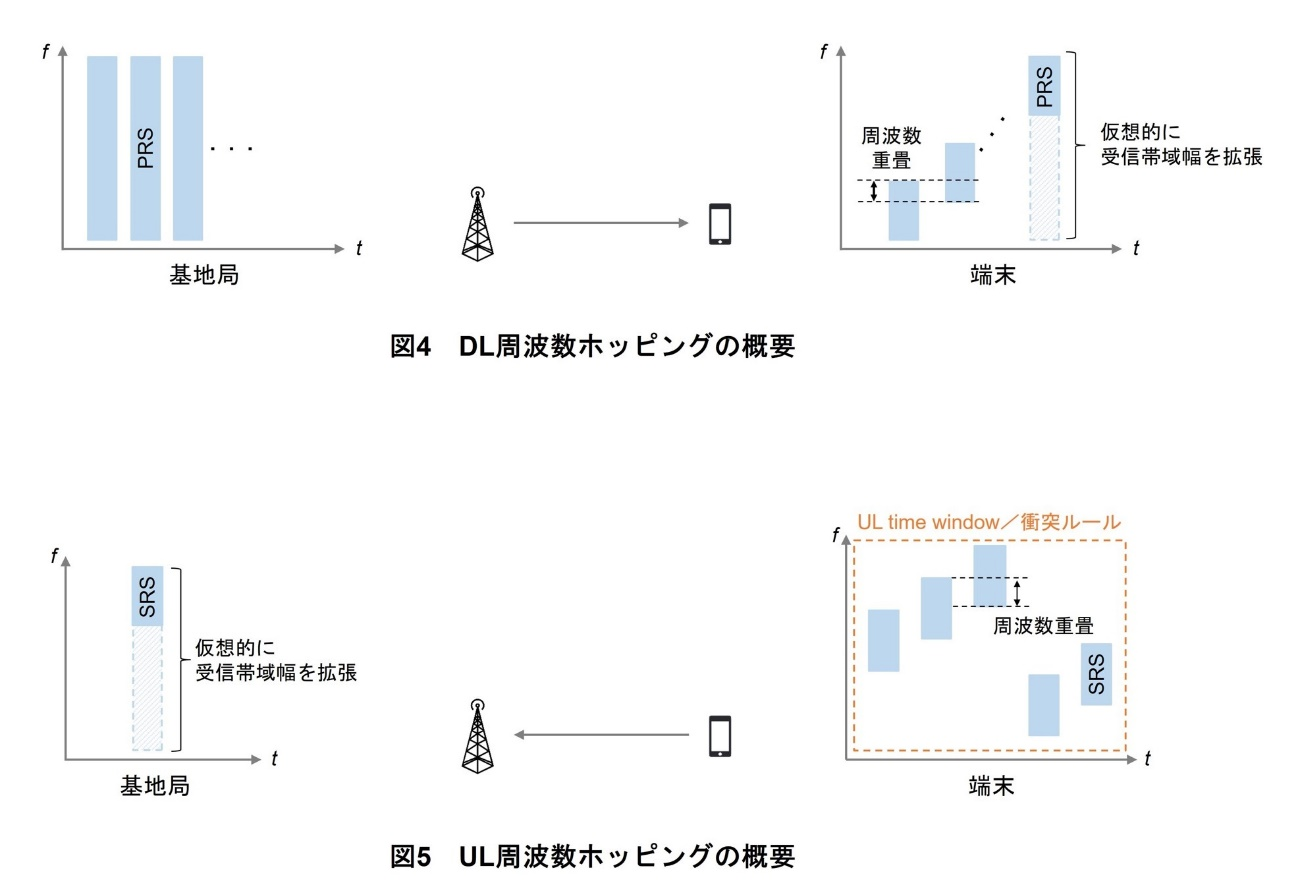
そこでRel-18では,RedCap/eRedCap端末向けに,帯域幅削減による測位精度への影響を軽減する仕様化が行われた.具体的には,PRSを周波数軸上でホッピング*49させた信号を合成することで仮想的に広帯域幅での測定を実現する.ただし,ホッピングしながら測定される各PRSにはリソースごとにランダムな位相シフト*50が生じてしまい,そのままでは信号を合成することができない.そこで,あらかじめ一部の周波数を重畳させてPRSの送信・受信を行うことができるように仕様化された.受信機側では重畳部分の位相を測定し補正することで信号の合成が可能となる.位相補正性能とリソース効率性のトレードオフを考慮し,伝搬環境に応じて重畳量を0,1,2,4PRB(s)(Physical Resource Block)*51から選択して設定可能である.重畳を考慮して通常端末と等しいFR1で100MHz,FR2で400MHzの帯域幅が確保できるよう,最大6つのリソースをホッピングさせることが可能である.
DLではRRC_CONNECTED*52/RRC_INACTIVE/RRC_IDLE状態で本ホッピング機能が適用可能である.DLでの周波数ホッピングの概要を図4に示す.基地局側ではスマートフォン向けと同様FR1で最大100MHz,FR2で最大400MHzの帯域幅でDL PRSを送信している.端末側でDL PRSを受信し,ホッピングリソースの合成処理を行う.
ULではRRC_CONNECTED/RRC_INACTIVE状態で本ホッピング機能が適用可能である.ULでの周波数ホッピングの概要を図5に示す.ULの測位専用参照信号であるUL SRS(Sounding Reference Signal)*53 for positioningを送信する端末側でホッピングを行い,受信する基地局でホッピングリソースの合成処理を行う.SRS for positioningが周波数ホッピング中に生じたSRS for positioning以外のUL信号/チャネルやDL信号/チャネルと衝突する際の動作として,SRS for positioningの送信を優先するUL time windowと,その他の信号,チャネルを優先する衝突ルールの2つが仕様化された.
3.2 UAV
Rel-15 LTE UAVでは,高度報告,航路報告,過剰な品質測定報告の抑止機能が仕様化された.一方でRel-18 NR UAV向けには,LTE UAVの基本機能が盛り込まれたほか,さらなる機能拡張が行われた.具体的には,①高度を考慮した品質測定報告のトリガ,②高度に応じた測定対象SSB(Synchronization Signals/Physical Broadcast CHannel Block)*54の設定,③UAV航路情報の更新,④UAV IDや衝突の報知機能が導入された.
- 高度を考慮した品質測定報告のトリガについては,端末の高度情報と既存イベント(eventA3,A4,A5*55)とを複合した新規イベントが導入された.例えば,eventA3H1という新規イベントでは,隣接セルの品質を表す値が接続セルのそれと比較して所定値以上大きい場合,かつUAV端末の高度が所定しきい値を超える場合に満足され,測定品質報告がトリガされる.
- 高度に応じた測定対象SSBの設定については,従来の仕様ではSMTC(SSB based RRM Measurement Timing Configuration)*56測定期間中に測定する対象SSBを測定周波数ごとに設定可能だが,検出され得るSSBは上空UAV端末と地上端末で異なるため,上空UAV端末を対象に,高度に応じた測定対象SSBが設定可能になった.
- UAV航路報告の更新については,航路情報更新のトリガとなる距離しきい値と時間しきい値が設定可能になった.設定された場合,位置情報または時刻情報について,航路の新しい情報と過去の情報との差分が,その設定されたしきい値を超える際に航路更新を報告できる.
- UAV IDや衝突の報知機能については,ドローン規制局がドローンの飛行を検知できるようにUAV IDをサイドリンクにてブロードキャストする機能(BRID(Broadcasting UAV ID)),およびUAV同士の衝突を防ぐためのブロードキャスト機能(DAA(Detect and Avoid))が導入された.
3.3 Positioning
(1)測位精度向上技術
NRにおける位置測位技術では,測位専用参照信号としてPRSが採用されている.Rel-16/17ではPRSを用いた測位方式として,DL-TDOA(Time Difference Of Arrival)*57,UL-TDOA*58,Multi-RTT(Round Trip Time)*59のTimingベースと,DL-AoD(Angle of Departure)*60,UL-AoA(Angle of Arrival)*61のAngleベースとが定義されている.Rel-18ではセンチメートルレベルの測位精度実現を見据え,(a)PRSアグリゲーションの仕様化,(b)CPP(Carrier Phase Positioning)の仕様化が行われた.
(a)PRSアグリゲーション
新たな測位手法の採用に加え,従来NR位置測位技術の高精度化も行われた.Rel-17までのNR位置測位はCC(Component Carrier)*62単位で測定情報の取得および測位計算を行っていたが,それら測定情報を組み合わせて一意の測位結果を導く動作については仕様化がなされていなかった.そこでRel-18では,広帯域のPRSリソースを束ねることで(PRSアグリゲーション)周波数リソースを増やし,時間分解能を向上させることを目的として仕様化が行われ,これにより,特にTimingベースの測位精度向上を実現することが可能になった.
Rel-18では,最大で3CCsのintra-band contiguous carriers*63のPRSを束ねて位置測位計算を行う機能が採用された.伝搬時間の測定・報告については,測位精度の向上効果を最大化するため,単に測定値を平均化するのではなく,PRSアグリゲーションが適用可能なシンボルマッピングパターン*64などの設定パラメータが規定され,またRel-17で導入されたTEG(Timing Error Group)*65IDが同一のPRSのみ束ねられるなどのアグリゲーション条件が規定された.RSRP(Reference Signal Received Power)*66/RSRPP(Reference Signal Received Path Power)*67などの受信電力の測定・報告についても,束ねたCCを平均化した値をネットワークに報告することが可能になった.さらに,アグリゲーション中に一部のCCのPRSが他Signalと衝突した際のPRS受信・送信動作についても明確化され,SRS for positioning送信を止めること,DL-PRSは一部のCCで測定を継続してもよいことが規定された.
(b)CPP
NRにおける従来の位置測位技術では,前述のとおりPRSの到来時間差・往復到来時間や到来・発射角を基にターゲット端末の位置推定を行っていた.一方で,GNSS測位では搬送波位相(CP)*68を用いることで衛星と受信端末間の伝搬距離を推定する測位方式が採用されており,これによりセンチメートルレベルの測位精度を実現している.これに対し,GNSSが苦手とする屋内での高精度測位が必要なユースケースへの領域拡大,例えばIIoTへの適用領域拡大を目的に,Rel-18でCPPが採用された.
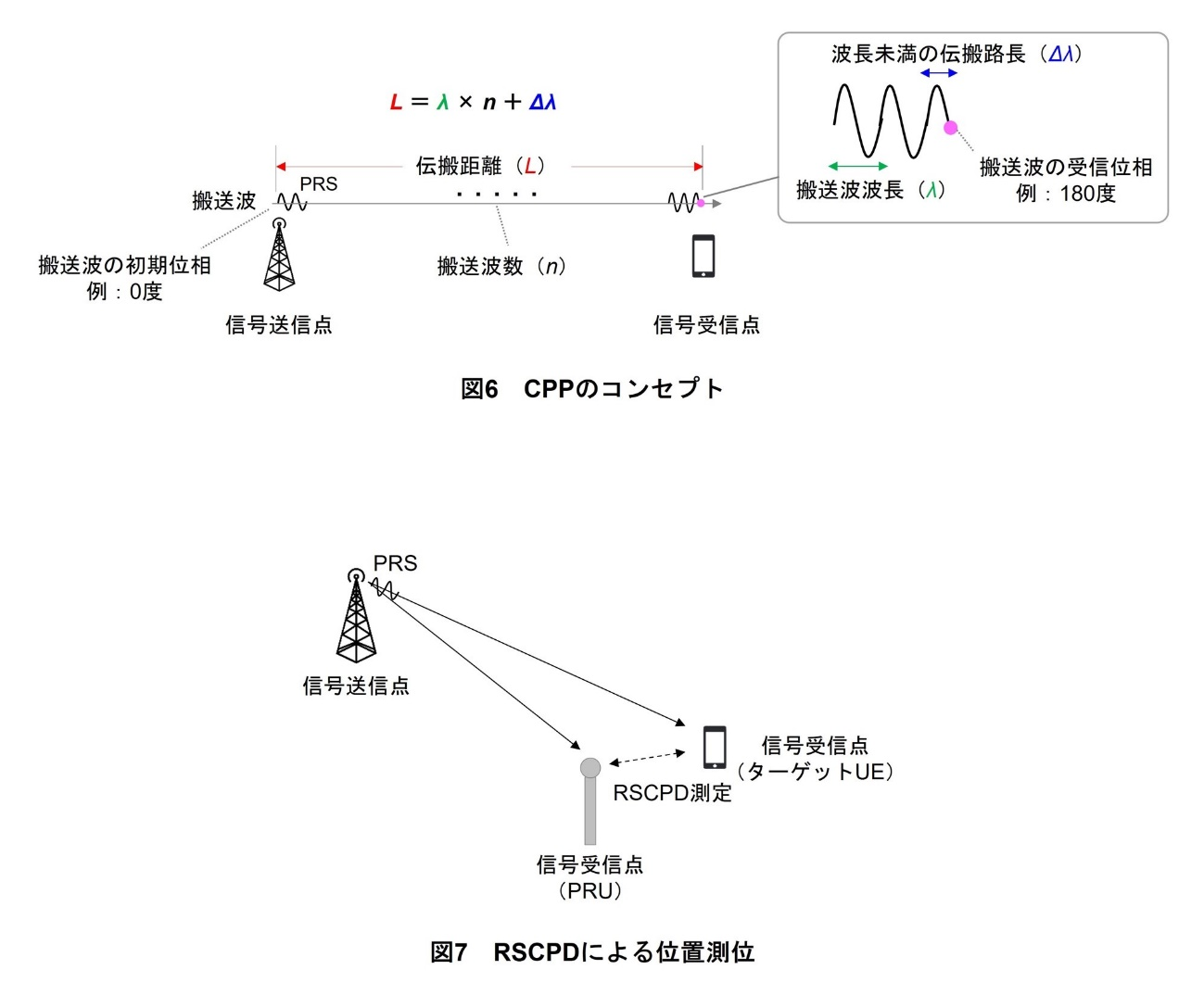
CPPの特長は,信号送信点と受信点の間における搬送波の位相回転量を推定することにより,搬送波波長,つまりセンチメートルレベルの位置測位が可能になる点である(図6).これを実現するためには,信号送信点と受信点間の伝搬距離を搬送波波長レベルで測定することが重要である.この推定過程はInteger ambiguity resolution*69とも呼ばれ,NRでは大きく分けて2つのアプローチが想定されている.
- 1つ目は既存のNR位置測位技術で用いる測定値を利用する手法である.具体的には,RSCP(Reference Signal Carrier Phase)*70測定時は基地局側のRx-Tx Time difference*71と端末側のRx-Tx Time differenceを用い,RSCPD(Reference Signal Carrier Phase Difference)*72測定時にはRSTD(Reference Signal Time Difference)*73やRTOA(Relative Time of Arrival)*74を用いることで,おおよその伝搬距離が推定でき,搬送波位相回転量の候補範囲を大幅に絞ることが可能である.
- 2つ目は測位基準点とも呼ばれるPRU(Positioning Reference Unit)*75を用いた位相測定機能である.その1つとして採用されたものがRSCPDによる位置測位技術であり,例えばターゲット端末とPRUで同一PRSを受信し,それぞれCP測定を行うことによって得られる受信位相差から,正確な位置情報を有するPRUに対するターゲット端末の相対的な位置を推定することができる(図7).
(2)測位適用端末拡大技術
前述したとおり,近年はRedCap端末やV2X向け端末などスマートフォン以外の種類の端末が拡大している.Rel-18のNR位置測位技術は,これらのような端末向けに特化した測位最適化を行うために,(a)低消費電力位置測位(LPHAP:Low Power High Accuracy Positioning)の仕様化,(b)RedCap端末での測位精度向上,(c)サイドリンク端末向け測位の仕様化の3種類の機能拡張が行われた.各拡張機能の詳細は,それぞれの章を参照されたい.
3.4 サイドリンク
(1)アンライセンスバンドのサポート
Rel-18では,データレート向上や適用領域の拡大を目的として,5~6GHz帯のアンライセンスバンドにおけるサイドリンクの規格が導入されるが,同バンドの使用にはそれぞれの国・地域において規定されたレギュレーションを満たす必要がある.Rel-16で仕様化されたNR-U(NR Unlicensed)[4]と同様に,キャリアセンス*76のためのLBT(Listen Before Talk)*77メカニズム,およびOCB(Occupied Channel Bandwidth)要件*78のための信号構成がサイドリンク向けに仕様化された.
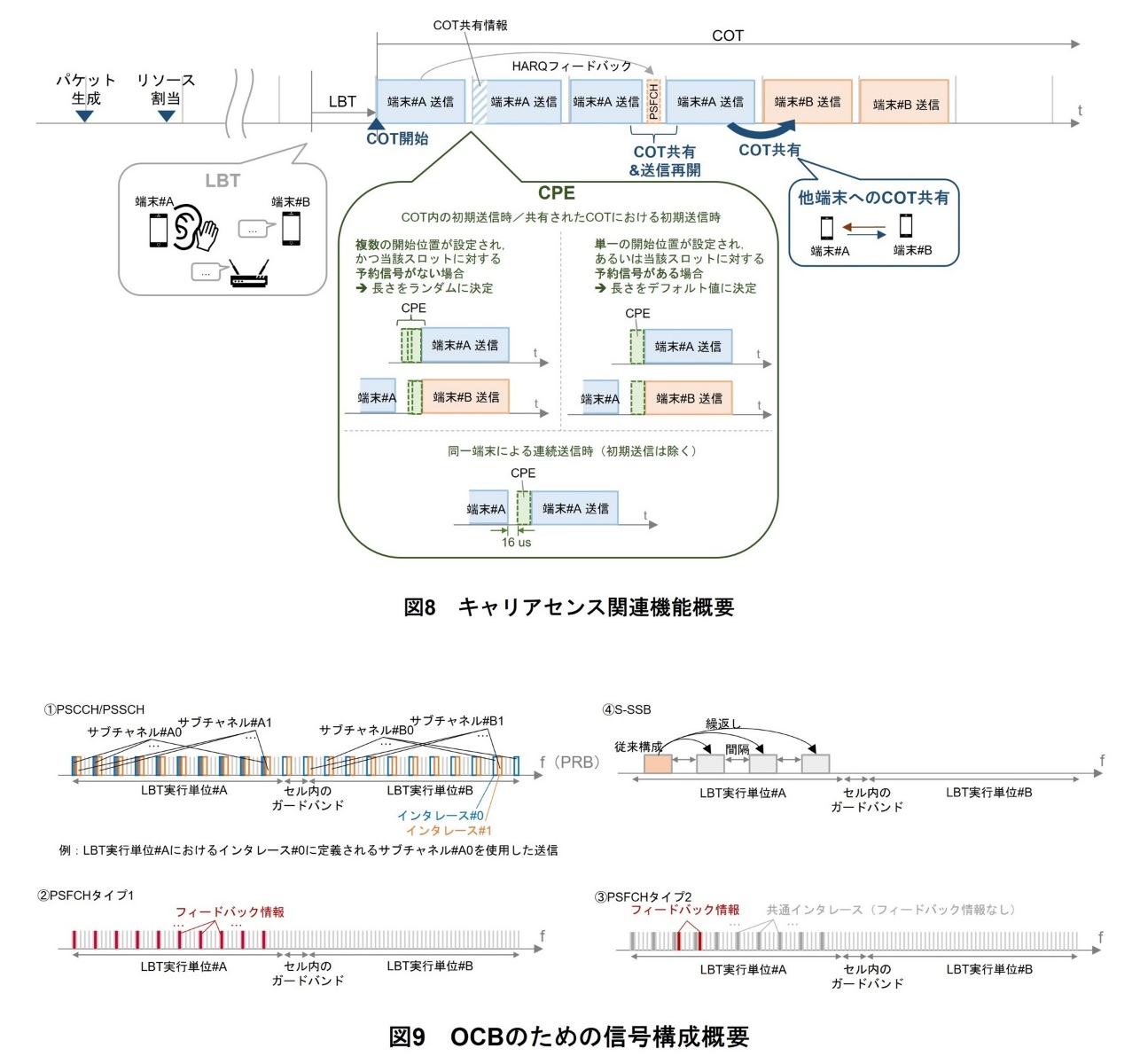
(a)LBT関連機能
LBTメカニズムとしてはNR-U向けの規定[4]を踏襲しているが,サイドリンク特有の機能として,ある端末が獲得した送信機会(COT(Channel Occupancy Time)*79)を他端末に共有する仕組みが導入された.データ送信とともに送信されるサイドリンク制御情報(SCI(Sidelink Control Information))として,COT共有に関する情報と対象端末の情報とが送信可能である.
また,獲得したCOTの維持のために,同一端末または異なる端末から送信される2つの送信間の時間ギャップを減らす機能であるCPE(Cyclic Prefix Extension)も,NR-U同様に仕様化された.ただし,各端末の自律的なリソース選択が行われるサイドリンクにおいては,他端末の送信が同時に行われることが分かっている場合にはサイドリンク端末間で送信開始タイミングを揃えるように動作することで,不要なLBT失敗を回避する.
以上のLBT関連機能の概要を図8に示す.さらに,LBTを実行しつつサイドリンク通信を効率的に実行するための,自律的なリソース選択の機能拡張も行われた.
(b)OCB要件のための信号構成
OCB要件のための信号構成については,サイドリンク制御チャネル(PSCCH:Physical Sidelink Control CHannel)*80,サイドリンクデータチャネル(PSSCH:Physical Sidelink Shared CHannel)*81,およびサイドリンクフィードバックチャネル(PSFCH:Physical Sidelink Feedback CHannel)*82向けにインタレース構成*83が導入された.信号構成の概要を図9に示す.
PSCCH/PSSCH向けには,従来のデータ割当て粒度であるサブチャネル*84とインタレースとが紐づけられる(図9①).
PSFCHのインタレース構成としては2種類が規定され,タイプ1では従来のPSFCHフォーマットをそのままインタレース内にコピーした構成(図9②),タイプ2では「OCBを満たすために送信される共通インタレース」と「フィードバック情報を送信する専用PRB」とを組み合わせて使用する構成(図9③),となっている.タイプ1はタイプ2に比べて構成の簡易さや信頼性が高く,タイプ2はタイプ1に比べてPSFCHについて高いキャパシティを提供する.
サイドリンク同期信号ブロック(S-SSB:Sidelink SSB)*85の信号構成は,従来の信号構成を周波数方向に一定間隔で繰り返すものとして規定された(図9④).
(2)キャリアアグリゲーション
図2に示したケースを対象としていることから,Rel-18のキャリアアグリゲーション機能は限定的な構成が想定されている.リソース割当て動作としては端末による自律的なリソース選択とし,同一のサブキャリア間隔*86であるバンド内キャリアアグリゲーションのみがサポートされ,各CCで独立の動作として規定された.
従って,仕様化された機能は以下の2つである.
- 1つ目はCC間の同期機能であり,同期対象はCC間で共通のものが用いられる.端末間同期のためのS-SSBの送信は単一CCまたは複数CCで実行され,いずれを適用するかは端末能力によって決定される.
- 2つ目は同時送信のための送信電力制御,および同時送受信の発生時における優先制御である.PSCCH/PSSCHの同時送信またはS-SSBの同時送信が発生した場合,各送信の優先度を比較して優先度の低い送信の電力を削減するか送信を中止する.複数のPSFCH送信の同時実行が発生した場合,あるいはPSFCH送信とPSFCH受信の同時実行が発生した場合,単一CCにおける衝突対処をそのまま複数CCに拡張して実行する.
(3)LTEサイドリンクとの共存
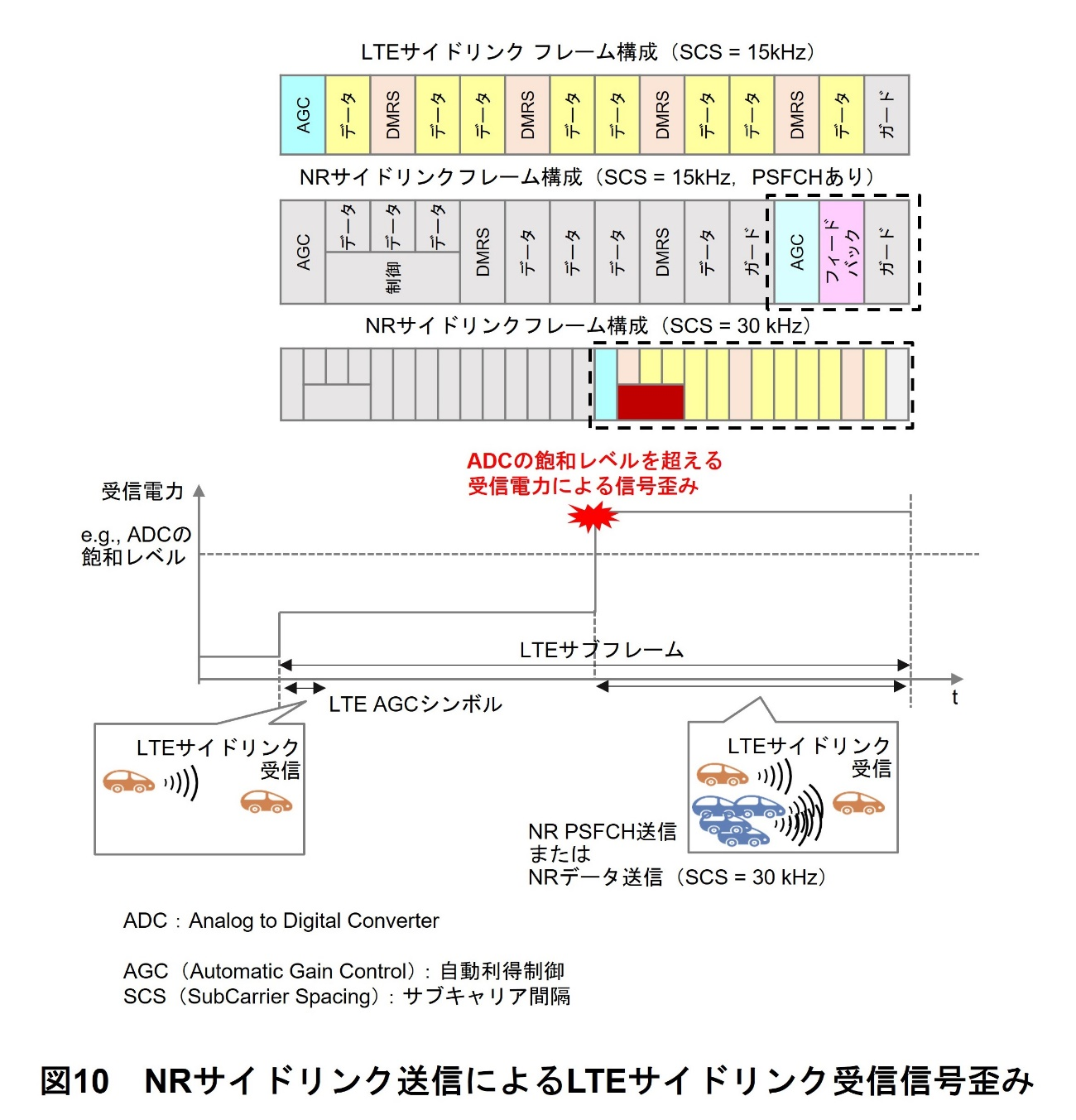
図2に示したように,限られた帯域幅でLTEサイドリンクとNRサイドリンクとを有効に利用するため,それぞれに利用可能なリソース候補が重複するケースを想定し,実際に使用するリソースの衝突を回避する機能を導入した.具体的には,ある端末におけるLTEサイドリンクのPSCCH/PSSCH送信と別の端末におけるNRサイドリンクのPSCCH/PSSCH送信との衝突回避動作,ある端末におけるLTEサイドリンクのPSCCH/PSSCH送信と同一端末におけるNRサイドリンクのPSCCH/PSSCH送信との衝突回避動作,LTEサイドリンクの1サブフレーム*87の途中でNRサイドリンクの送信が開始されることによる受信端末における受信信号歪みの回避動作,の3機能である.
- 1点目については,NRサイドリンクのPSCCH/PSSCH送信端末は,LTEサイドリンクにおけるリソース予約のモニタリングを行い,LTEサイドリンクにおける他端末のPSCCH/PSSCH送信と衝突しないNRサイドリンクリソースを選択するように動作する.
- 2点目については,LTEサイドリンクにおける自身の送信予定リソースと衝突しないNRサイドリンクリソースを選択するように動作する.
- 3点目については,該当するNRサイドリンクの送信として,図10に示すようにPSFCH送信と30kHzサブキャリア間隔の場合のPSCCH/PSSCH送信とがある.どちらの送信についても,受信回路に入力される電力がLTEサブフレームの途中で大きくなり,信号波形の歪みにつながってしまう.
これを回避するために,NRサイドリンクのPSCCH/PSSCH送信端末は,LTEサイドリンクにおけるリソース予約のモニタリングを行い,LTEサイドリンクにおける他端末のPSCCH/PSSCH送信と,NRサイドリンクにおけるPSFCHとが衝突しないようにNRサイドリンクのPSCCH/PSSCHリソースを決定する.また,NRサイドリンクのPSCCH/PSSCH送信端末は,LTEサイドリンクにおけるリソース予約のモニタリングを行い,LTEサイドリンクにおける他端末のPSCCH/PSSCH送信サブフレームの途中で送信電力増加が生じないように動作する.
(4)サイドリンク端末での測位サポート
NRでは,端末間通信機能,すなわちサイドリンク機能はRel-16から仕様化されているが,これまでサイドリンクを利用した位置測位技術は仕様化されていなかった.一方で,近年はV2Xに限らず広い市場から要望があることも踏まえ,Rel-17までに仕様化されたNR位置測位技術をベースにサイドリンク位置測位技術が仕様化された.
サイドリンク位置測位で用いる専用参照信号として,新たにSL-PRS(SideLink-Positioning Reference Signal)が仕様化された.端末間でSL-PRSの送受信を実行し,TDOAやRTT,AoAなどを取得することで位置を計算する.
NRでは,サイドリンク端末が使用するリソースはRP(Resource Pool)*88として定義されており,サイドリンク位置測位でも同様にSL-PRS向けのRPが規定された.具体的には,データ信号とSL-PRSでリソースを共有し柔軟な割当てが可能なShared RPと,SL-PRSのみに限定することで広帯域リソース利用を可能とするDedicated RPの,2つのRPタイプが仕様化された.
SL-PRSの送信に用いるリソースの割当てに関しても,通信用のリソース割当ての仕組みと同様に,ネットワークからSL-PRSリソースのスケジューリングを行うモードと,サイドリンク端末が自律的にSL-PRSリソース決定を行うモードの2種類が定義された.また,SL-PRSの信号構成については,DL-PRSと同様にcomb(櫛状)マッピングパターン*89が採用され,RPタイプによって適用可能なパターンは異なるが,1,2,4,6 combサイズ*90および1から9シンボルの構成が仕様化されている.
3.5 Industrial IoT
(1)Time resiliency
Rel-16/17 Industrial IoTでは,5Gを用いる高精度時刻同期機能が仕様化された.Rel-18では,時刻同期精度が落ちることを考慮し,時刻同期ステータスをモニターする機能が導入された.
時刻同期ステータスをモニターする方法は,RRC_CONNECTED状態の端末かRRC_IDLE/INACTIVE状態の端末かによって異なる.具体的には,RRC_CONNECTED状態の端末には基地局はRRC messageでクロック品質情報を直接送る.クロック品質情報としては①クロック品質メトリック*91,および②基地局の時刻同期ステータスが含まれる.
- クロック品質メトリックは,時刻同期の状態を表すパラメータで,clock accuracy*92,traceability to UTC(Coordinated Universal Time)*93,traceability to GNSS*94,frequency stability*95,parent time source *96,synchronization state*97から1つまたは複数を設定できる.
- 基地局の時刻同期ステータスは,基地局のクロック品質がAMF(Access and Mobility management Function)*98からの同期精度評価指標を満たすか否かを示すパラメータである.満たさない場合は,時刻同期精度が落ちたことによるエラーを防ぐために,アプリケーションサービスを一時的に停止することができる.
前回の同期から時間が経っている場合,再同期を行う必要があるが,この際に,端末はRRC_IDLE/INACTIVE状態に落ちている可能性がある.そこでRRC_IDLE/INACTIVE状態の端末には,基地局からシステム情報でクロック品質情報の更新の有無を報知する機能が導入された.クロック品質情報の更新があることを示す報知を受信した端末は,RRC_CONNECTED状態へ遷移する.端末がRRC_CONNECTED状態になったあと,基地局からクロック品質情報が送られる.
(2)LPHAPのサポート
一般的に,工場で使用されるセンサのような端末では頻繁な充電や電池交換を想定しておらず,バッテリ消費を考慮した測位が求められる.TS 22.104[5]のユースケース#6で示されているように,水平測位精度1m以内,測位周期15~30秒,バッテリ寿命6~12カ月をターゲットとした省電力測位の仕様化が行われた.
RRC_INACTIVE状態向けのSRS for positioningの設定は,端末がセル間を移動するたびに一度RRC_CONNECTED状態へ遷移して再設定されており,この頻繁な遷移が省電力測位の課題となっていた.そこで,セル間を移動する際にも省電力測位が継続できるよう,SRS for positioningの設定が,有効エリアと呼ばれる複数セルの単位内で共通化された.なお,後述する①UL送信タイミング,②ULビーム空間関係*99,③UL送信電力制御の3点については有効エリア内で共通の設定は行われないが,これらについてもRRC_CONNECTED状態への遷移を伴わない,以下の端末動作が規定されている.
- UL送信タイミングについては,端末はデフォルト動作として,有効エリア内において最後のサービングセル*100における送信タイミングを維持する.あるいは端末が追加機能を有している場合は,ネットワークからの設定に基づいて,端末はセル再選択が起こったタイミングでこれまでの送信タイミングを破棄し,自律的にUL送信タイミングを調整することも可能である.
- ULビーム空間関係については,SRS for positioningの送信ビーム決定に用いる参照信号の情報をネットワークが事前に設定することができる.この場合,端末はその事前に設定されたDL参照信号を利用してULビームを決定する.ただし,その参照信号が正しく測定できないと判断した場合,端末はULの送信を中止し,正確な測定が可能になるまで待機する.
参照信号の情報がネットワークから事前に設定されない場合,端末は固定のビーム,もしくはSRSリソースごとに異なるビームを利用する. - UL送信電力制御については,参照信号の情報が事前にネットワークから設定されている場合,端末は指示されたDL参照信号を利用してUL送信電力を決定する.
参照信号の情報がネットワークから設定されない場合,もしくは正しく測定できないと判断した場合,端末はMIB(Master Information Block)*101を取得したSSBからUL送信電力を計算する.
その他の端末省電力を実現する方法として,SRS for positioningの最大送信周期が従来の10,240msから20,480msに拡張され,また,DL-PRSを用いたRSTD,RSRP,RSRPPの測定がRRC_IDLE状態向けに拡張された.
3.6 NTN
空中・海上・山間部などの新カバレッジ向けのネットワークとして期待されるNTNについて,Rel-18においてもRel-17のNTN仕様と同様に,中継局としては静止軌道(GEO:GEostationary Orbit)やLEOなどの衛星および成層圏におけるHAPS(High Altitude Platform Station)*102などの飛行体が,端末としてはGNSS機能を備えたVSAT端末およびスマートフォンなどの小型端末が,それぞれ想定されている.
(1)ULのカバレッジ改善
前述のとおりスマートフォンなどの端末を想定して,必要な通信品質を満たしていないULチャネルの評価が行われ,その評価結果に基づいて,①初期アクセスに用いられる上りリンク制御チャネル(PUCCH:Physical Uplink Control CHannel)*103の繰返し送信のサポートと,②上りリンクデータチャネル(PUSCH:Physical Uplink Shared CHannel)*104におけるDMRS(DeModulation Reference Signal)*105バンドリング機能のNTN向けの拡張とが仕様化された.
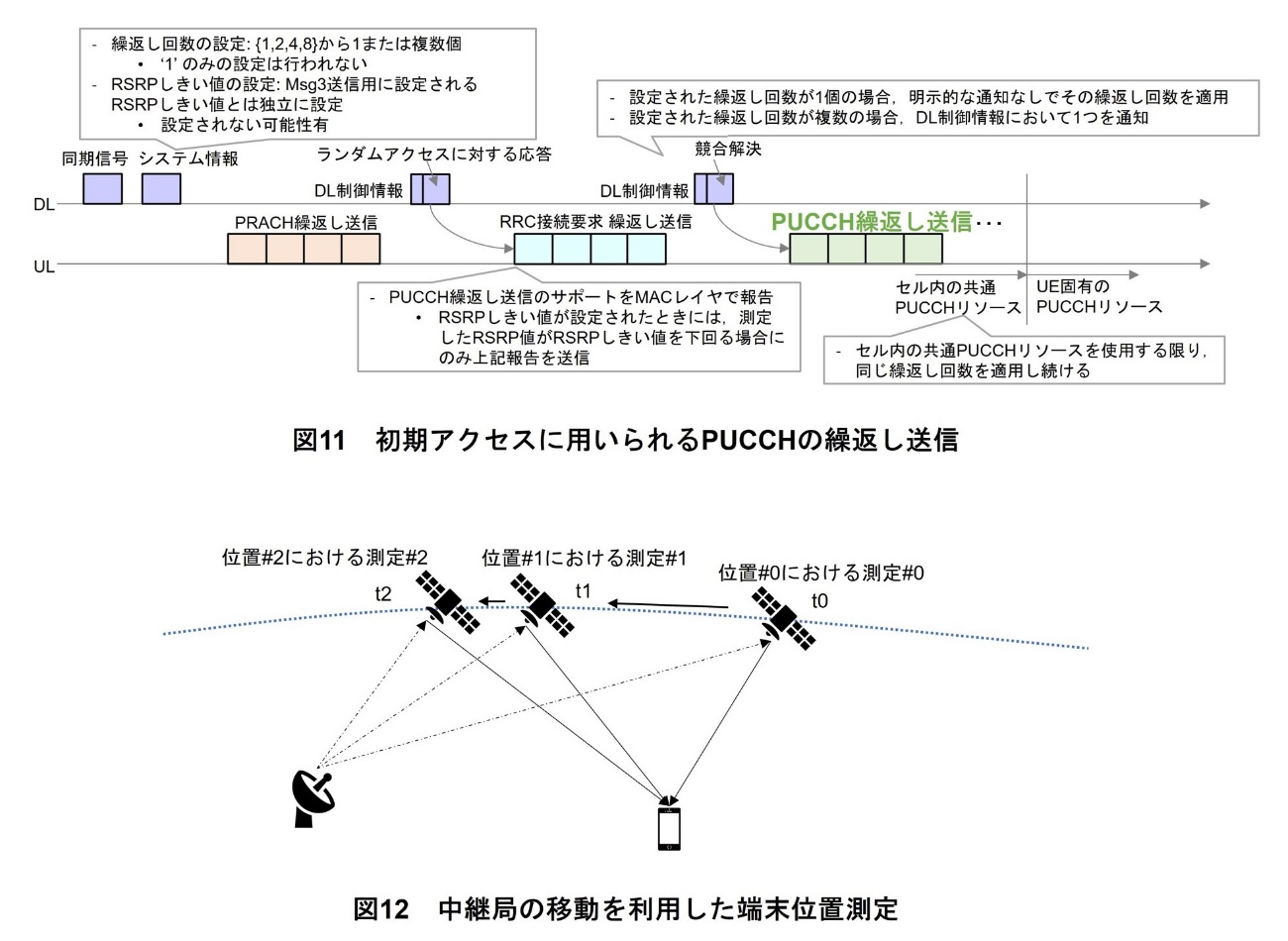
- 初期アクセスに用いられるPUCCHの繰返し送信については,セル内共通のシステム情報を介して繰返し送信が端末に通知され,その繰返し送信を実行可能な端末は,ネットワークからの信号の受信強度とネットワークからの指示とに基づいて,繰返し送信の実行有無と繰返し回数とを決定して送信する.ネットワークは,各端末が繰返し送信を実行可能か否かについて,初期アクセスにおいてPUCCHの前に送信されるPUSCHを介して報告を受ける.動作フローを図11に示す.
- PUSCHにおけるDMRSバンドリング機能のNTN向けの拡張については,Rel-17において仕様化されたPUSCH向けDMRSバンドリング機能を基にしており,本機能は複数スロットをまとめてチャネル推定*106できるようにすることで受信品質,すなわちカバレッジを改善する.
複数スロットまとめてのチャネル推定を適用するためには,その時間区間内においてPUSCHの送信電力を一定に保つとともに,位相の連続性を保ち,かつ位相変化を一定量以下に収める必要がある.しかしながら,NTN,特にLEOなど中継局が移動するケースでは中継局の移動に起因して大きな位相回転が生じてしまう.そこでNTN特有の位相回転については,端末があらかじめ補償する動作を実行するものとし,補償を行いながらPUSCHが送信される.補償動作を実行できる端末はその能力をネットワークに報告する.
(2)端末位置の妥当性検証
端末位置確認の機能として,既存仕様でTN向けにサポートされている端末位置測定機能をベースにしたNTN向けの仕組みが導入された.TNにおいては端末が複数の基地局との間で信号を送受信することで位置が計算されるが,NTNにおいては単一の中継局との間でのみ信号を送受信できるケースが主である.従って,LEOなど中継局が移動することを利用して時間をずらして種々の測定を行うことで,位置計算を実現する.概要を図12に示す.
端末位置測定機能としてはMulti-RTT方式を対象とし,大きな遅延時間や特殊な同期方法などに起因するNTN特有の測定や情報報告(例えば,DLタイミングの時間ずれ,フィーダリンク*107や衛星軌道についての情報)が,基地局および端末によって実行される.
(3)NTN-TN間およびNTN-NTN間モビリティの機能拡張
NTN-TN間モビリティについては,NTNセルに位置する端末がRRC_IDLEあるいはRRC_INACTIVE状態であるときの不要なTN周波数測定を避けるために,SIBで各周波数におけるTNの物理カバレッジを報知する機能が導入された.TNの物理カバレッジはTNの中心位置と半径で表される.NTNセルに位置する端末はTN物理カバレッジがある場所のみにおいてTN周波数測定を行うことで,端末内の消費電力を低減する効果が期待される.
NTN-NTN間モビリティについては,RACH-less handoverという機能が導入された.特にNTNセルがearth moving cellの構成をとる場合のカバレッジは地表に対して移動するため,セル内の端末は定期的に一斉に次のセルにハンドオーバする必要がある.NTN cellに収容する端末数は非常に多いと想定され,その多数の端末からランダムアクセス信号を送信することで,上りの送信オーバーヘッドが大きくなってしまうという問題がある.RACH-lessハンドオーバ機能ではTarget cellのTA(Timing Aadvance)*108値が0あるいはSource cellと同じ値の場合,端末はTarget cellとランダムアクセスを行わず,直接アクセスしてもよい.端末はTarget cellに対して始めの上りデータ送信を行うために,configured grant*109のPUSCHリソースが基地局から事前に設定される.あるいはTarget cellに対する始めの上りデータ送信に,dynamic grant*110のPUSCHリソースを用いることも可能である.
(4)VSAT端末向けの周波数帯サポート
DL17.3~20.2GHz,UL27.5~30.0GHzをVSAT端末向けに利用可能とするために,これらの周波数帯はFR2-NTNとして定義され,主に端末および基地局の無線パフォーマンス規定と試験仕様の策定が行われた.また,セルサーチはFR2仕様に従い,スケジューリングのタイミングオフセットおよびTAのレポートは,FR1におけるNTN仕様と同じ仕組みに従うものと定められた.
PRACH(Physical Random Access CHannel)*111の設定については,TDD(Time Division Duplex)*112におけるFR2向けの仕様を,FDD(Frequency Division Duplex)*113であるFR2-NTNにも使用する.
- FR1:450~6,000MHzの周波数帯を指す.
- データチャネル:下りリンクのデータ送信に使用される物理チャネルPDSCH(*34参照)および上りリンクのデータ送信に使用される物理チャネルPUSCH(*104参照)など,データ送信に使用される物理チャネルの総称.
- スロット:データのスケジューリング単位.複数のOFDMシンボルから構成される.
- ベースバンド:無線信号の搬送波への変調前や復調後の信号帯域.
- RF:無線通信の搬送波に用いられる周波数の信号および電波のこと.
- SIB:基地局から端末へ一斉同報される報知情報の1つで,無線ブロックに分割されており,そのブロック単位を示す.
- RAR:ランダムアクセスにおいて基地局が端末からのプリアンブル送信検出に応答して送信する一時的な端末識別子や,以降のランダムアクセスにおけるリソース割当てなどの情報.
- ページング:待ち受け状態で在圏する端末への着信の通知.
- PDSCH:DLでデータパケットを送受信するために用いる物理チャネル.
- HARQ-ACK:データの受信ノードが正常に受信(復号)できたか否かを送信ノードに通知する受信確認信号.
- 同期信号:移動局が通信の開始に必要な周波数と受信タイミングおよび同期元識別子(セルIDなど)の検出を行うための物理信号.
- 報知チャネル:システムの運用情報を報知するための共通チャネル.移動端末は電源投入時などに,このチャネルを読み取ることで,通信事業者コード,共通チャネル構造や周辺セル情報などの通信開始に必要な情報を取得する.
- 参照信号:基地局から端末に設定される既知信号.
- MIMO:複数の送受信アンテナを用いて信号の伝送を行い,通信品質および周波数利用効率の向上を実現する信号伝送技術.
- 変調多値数:データ変調における信号位相点の数.例えば,QPSK(Quadrature Phase Shift Keying)の場合は4,16QAM(Quadrature Amplitude Modulation)の場合は16である.
- スケーリングファクター:端末のベースバンド処理能力に応じて0.4,0.75,0.8または1から選択される値.値が大きくなるにつれ,単位時間当たりのベースバンド処理能力が高いことを示す.
- RRC_INACTIVE:端末のRRC状態の1つであり,端末は基地局内のセルレベルの識別をもたず,基地局およびコアネットワークにおいて端末のコンテキストが保持されている.
- eDRX:間欠受信制御DRXにおけるDRX(*44参照)周期の拡張.
- DRX:端末の消費電力削減を目的とする間欠受信制御.
- PRS:測位専用の参照信号.DL信号はDL-PRS,UL信号はSRS for positioningが規定されている.
- シンボル:伝送するデータの時間単位であり,OFDM(Orthogonal Frequency Division Multiplexing)の場合は複数のサブキャリアから構成される.各サブキャリアには複数のビット(例えばQPSKなら2bit)がマッピングされる.
- 合成受信:受信機で受信された信号を合成し1つの測定結果を得る方法.
- 時間分解能:Timingベース測位においては,端末 - 基地局間の距離を参照信号の伝搬時間測定結果を基に推定する.その測定分解粒度のこと.
- ホッピング:送信ごとに異なる周波数,あるいは周波数リソースを用いて送信を行う方法.
- 位相シフト:送受信周波数切替えの際のRFに起因するランダムな位相回転,周波数の違いによる伝搬時の位相回転の違いなどにより生じる位相のずれ.
- PRB:無線リソースの割当て単位であり,1サブフレーム,および12サブキャリアから構成される.
- RRC_CONNECTED:端末のRRC状態の1つであり,端末は基地局内のセルレベルの識別をもち,基地局およびコアネットワークにおいて端末のコンテキストが保持されている.
- SRS:基地局側で上りリンクのチャネル品質や受信タイミングなどを測定するための参照信号.
- SSB:基地局が定期的に送信する,端末が通信に必要なセルの周波数と受信タイミングなどの検出を行うための同期信号.
- event A3,A4,A5:HO時に品質測定報告をトリガするイベントであり,event A3は隣接セルの品質が自セルの品質よりオフセットだけ良ければ,品質測定報告がトリガされる.event A4は隣接セルの品質が絶対しきい値より良ければ,品質測定報告がトリガされる.event A5は自セルの品質が絶対しきい値1より悪くなり,隣接セルの品質が絶対しきい値2より良ければ,品質測定報告がトリガされる.
- SMTC:端末がSSBを用いた受信品質測定を実施する際の,測定対象の測定開始タイミングや測定期間,測定周期を指す.
- DL-TDOA:複数の基地局それぞれから同時に送信された下りリンクの参照信号を端末が受信し,その到来時間差と各基地局の座標に基づいて端末の位置を推定する測位技術.
- UL-TDOA:端末から送信された上りリンクの参照信号を周辺の複数基地局が受信し,その到来時間差と各基地局の座標に基づいて端末の位置を推定する測位技術.
- Multi-RTT:端末と複数の基地局それぞれとの間の信号往復時間(RTT)および各基地局の座標に基づいて端末の位置を推定する測位技術.
- DL-AoD:基地局から送信された下りリンクの参照信号を端末が受信し,受信したビームのインデックスと受信強度および基地局側でのビームの水平方向および垂直方向の発射方向に基づいて端末の位置を推定する測位技術.
- UL-AoA:端末から送信された上りリンクの参照信号を基地局が受信し,水平方向および垂直方向の到来方向に基づいて端末の位置を推定する測位技術.
- CC:キャリアアグリゲーションにおいて複数用いるキャリアの1つひとつを表す用語.
- intra-band contiguous carriers:同じ周波数バンドの連続キャリアを複数用いて通信を行うシナリオ.
- シンボルマッピングパターン:あらかじめ仕様で規定された時間および周波数リソース配置.
- TEG:測位精度の劣化を軽減する機能.デジタル信号からアナログ信号(もしくはその逆)への処理にかかる遅延時間が一定値以下の,アンテナパネルやアンテナ素子のグルーピングを指す.
- RSRP:移動端末で測定される参照信号の受信レベル.移動端末の受信感度を表す指標の1つ.
- RSRPP:移動端末で測定される参照信号のパスごとの受信レベル.移動端末の受信感度を表す指標の1つ.
- 搬送波位相(CP):0~360度で表現されるNR搬送波の位相情報.
- Integer ambiguity resolution:搬送波位相を用いて信号送信点と受信点間の伝搬距離を計算する処理.GNSSでは複数の異なる周波数搬送波を用いる手法や,衛星の移動を利用して異なるタイミングで複数回測定する手法などが存在する.
- RSCP:搬送波の受信位相値.位置測位の高精度化のためにRel-18でDLおよびUL向けにそれぞれ規定された.Rel-18では既存のNR位置測位技術で取得する測定値とともに利用される.
- Rx-Tx Time difference:信号の送受信の時間差.
- RSCPD:ターゲット端末が複数のTRPから同時送信されたDL-PRSを受信する際に測定可能な搬送波の位相差.Rel-18では既存のNR位置測位技術で取得する測定値とともに利用される.
- RSTD:主に端末で測定される,2TP(Transmission Point)間の相対受信時間差.
- RTOA:主にTRPで測定される,2RP(Reception Point)間の相対受信時間差.
- PRU:位置情報がネットワークに対して既知であり,近傍ターゲット端末の位置測位計算補助に用いられる装置のこと.DL-PRSを受信し測定結果をネットワークへ報告したり,SRS for positioningをTRPへ送信したりする機能を備えている.
- キャリアセンス:電波を発射する前に,その周波数キャリアが他の通信に使用されていないかを確認する技術.
- LBT:端末がデータを無線上で送信する前に,他の端末がデータ送信を行っていないかを事前に確認する仕組み.
- OCB要件:信号電力の99%を有する帯域が送信帯域の80~100%に収まるように送信することとした法規制.
- COT:アンライセンスバンドにおいて基地局または端末がデータ送受信のために占有する時間区間のこと.
- サイドリンク制御チャネル(PSCCH):PSSCH(*81参照)受信やリソース予約に係る制御情報をサイドリンクで送受信するために用いる物理チャネル.
- サイドリンクデータチャネル(PSSCH):サイドリンクでデータパケットと一部の制御情報を送受信するために用いる物理チャネル.
- サイドリンクフィードバックチャネル(PSFCH):PSSCH受信に対する確認応答などのフィードバック制御情報をサイドリンクで送受信するために用いる物理チャネル.
- インタレース構成:一定間隔のPRBをひとまとまりとして扱う構成.
- サブチャネル:複数のPRBで構成されるリソース単位.サイドリンクでは,サブチャネル単位でリソース割当てが実行される.
- サイドリンク同期信号ブロック(S-SSB):端末間同期のためにサイドリンクで送受信される同期信号ブロック.
- サブキャリア間隔:OFDMなどのマルチキャリア伝送において信号を伝送する個々の搬送波の間隔.
- サブフレーム:時間領域の無線リソースの単位であり,複数のOFDMシンボル(LTEでは14OFDMシンボル)から構成される.
- RP:サイドリンクに利用可能な時間 - 周波数リソースのまとまり.通信のパラメータやリソースの設定,リソース割当てなどは,RPを対象として行われる.
- combマッピングパターン:信号リソースが同一サブキャリアに連続してシンボル配置されないようにするマッピング方法.
- combサイズ:combマッピングパターンにおける信号配置間隔.
- メトリック:対象の属性や状態を一定の基準に基づいて測定したり数値化したりしたもの.
- clock accuracy:参照クロックとの測定時間の差分を指す.単位はnsになる.
- traceability to UTC:現在の時間ソースはUTCに追跡できるかを表す.
- traceability to GNSS:現在の時間ソースはGNSSに追跡できるかを表す.
- frequency stability:他の時間ソースと同期していないときに,ローカルクロックの変化量の推測を表す.
- parent time source:現在ノードが使っている主要時間ソースを表す.“SyncE”,“PTP”,“GNSS”,“atomic clock”,“terrestrial radio”,“serial time code”,“NTP”,“hand_set”,“other”を設定できる.
- synchronization state:ノードの同期状態を示す.ITU T G.810で定義されている“Locked”,“Holdover”,or “Freerun”のモードを設定できる.
- AMF:5Gコアネットワークにおいて,基地局(gNB)を収容し,モビリティ制御などを提供する論理ノード.
- ULビーム空間関係:PUCCH(*103参照),SRSなどのUL送信に使用する端末のビームを指定する情報.
- サービングセル:端末が現在無線リンクを確立しているセルのこと.
- MIB:端末がセルサーチ後に最初に読むべき最低限の情報が含まれる報知信号.
- HAPS:地上約20kmなどの成層圏に位置し,地表から見て静止または旋回する飛行体.人工衛星のように通信局としての運用が期待される.低高度であることから,片道伝搬時間0.1ms程度の低遅延性や端末直接通信の容易さが利点として挙げられる.
- 上りリンク制御チャネル(PUCCH):ULで制御情報を送受信するために用いる物理チャネル.
- 上りリンクデータチャネル(PUSCH):ULでデータパケットを送受信するために用いる物理チャネル.
- DMRS:送受信信号を復調する際に用いられるチャネル推定用の参照信号.
- チャネル推定:信号が無線チャネルを経由したときの振幅や位相などを推定すること.
- フィーダリンク:NTNにおける地上局と飛行体とを結ぶ無線リンク.
- TA:基地局のUEに対する所望上り信号の受信タイミングと,実際の上り信号の受信タイミングとの差分を指す.
- configured grant:基地局からあらかじめユーザ個別にPUSCHリソースを割り当てておき,上りリンクデータが発生したら,SR(Scheduling Request)送信を行わずに端末が当該リソースでPUSCHを送信できる仕組みのこと.
- dynamic grant:端末がスケジューリングを要求し,基地局からDCIを送信してULデータの送信リソースを割り当てる仕組みのこと.
- PRACH:ランダムアクセス手順において移動端末が最初に送信する物理チャネル.
- TDD:ULとDLで,同じキャリア周波数,周波数帯域を用いて時間スロットで分割して信号伝送を行う方式.
- FDD:周波数分割複信.無線通信などで同時送受信を実現する方式の1つで,異なる周波数にて送信と受信を同時に行う方式.
04. あとがき
-
本稿では,Rel-18で規定された産業連携ソリューション向け無線技術について ...
開く
本稿では,Rel-18で規定された産業連携ソリューション向け無線技術について解説した.Rel-19においてもNTNの拡張技術や,RFID(Radio Frequency IDentification)*114のような周辺環境からエネルギーを得て通信動作を実行するIoT端末(Ambient IoT)向け技術の検討が進められており,さらなる産業創出・ソリューション協創をめざした仕様化が見込まれる.ドコモは引き続き5Gのさらなる発展および6G時代における産業連携ソリューションの創出に貢献していく.
- RFID:ID情報を埋め込んだ小さなICチップからID情報を無線によって取得し,人やモノを識別・管理する仕組み.
-
文献
開く
- [1] 熊谷,ほか:“3GPP Release 17における産業創出・ソリューション協創向け高度化技術,”本誌,Vol.30,No.3,pp.54-77,Oct. 2022.
- [2] 青栁,ほか:“産業創出・ソリューション協創に向けた5G高度化技術,”本誌,Vol.28,No.3,pp.65-81,Oct. 2020.
- [3] 3GPP TR38.865 V18.0.0:“Study on further NR RedCap UE complexity reduction,” Sep. 2022.
- [4] 松村,ほか:“モバイルブロードバンド向けの5G高度化技術,”本誌,Vol.28,No.3,pp.82-95,Oct. 2020.
- [5] 3GPP TR22.104 V18.3.0:“Service requirements for cyber-physical control applications in vertical domains,” Dec. 2021.

