

5G Evolution & 6G特集(2) —具体化に向けた取組みとユースケース—
セルラ通信×リアルハプティクスで拓く遠隔操作ロボットの革新的技術
遠隔操作ロボット 力触覚伝送 URLLC
六平 豊(むさか ゆたか) 堀内 涼汰(ほりうち りょうた)
森広 芳文(もりひろ よしふみ)
6Gネットワークイノベーション部
あらまし
遠隔操作ロボットなどの協調ロボットへの社会的要求が一層高まりつつあり,人間のように柔軟で優しい動きを再現できるロボティクス技術「リアルハプティクス®*1」に期待が集まっている.リアルハプティクスは人間がもつ繊細な触覚を扱うため,ほかのアプリケーションと比較しても遅延要件が非常に高い水準にあり,セルラ通信を介した実用化は未だできていない.そこで,ドコモでは,5GのURLLCを活用して実証実験を行い,リアルハプティクスの無線遠隔操作の実現可能性を示した.本稿では,セルラ通信とリアルハプティクスを融合して実現できる唯一無二な世界観とその実現可能性について解説する.
- リアルハプティクス®:リアルハプティクス®およびIoA®は,モーションリブ株式会社の登録商標.
01. まえがき
-
少子高齢化に起因する将来の労働力不足が懸念される我が国において,人間に代わる ...
開く

少子高齢化に起因する将来の労働力不足が懸念される我が国において,人間に代わる新たな働き手となり得るロボットと,それを実現するロボティクスへの社会的要求が一層高まりつつある.ドコモは,ロボティクスに関する将来性を見据えて,慶應義塾大学ハプティクス研究センター(以下,慶大)が開発したロボットの制御技術「リアルハプティクス」に着目している.
リアルハプティクスは,力触覚伝送技術*2によって遠隔操作ロボットが触れるモノの手応えを遠隔操縦者に感じ取ってもらうことができる.従来の遠隔操作において,操縦者は掴み心地や力加減量を視覚的に判断する必要があり,操縦者のセンスが求められていた.一方,リアルハプティクスによる遠隔操作の場合,操縦者は遠隔操作ロボットからのリアルなモノの手応えのフィードバックを受けつつ,より直感的にロボットを操作することができる.このようにして,リアルハプティクスは操縦者の直感的な力加減に基づいた柔軟で優しいロボット制御を可能にする.
慶大は,IoA(Internet of Actions)®の概念を提唱しており,リアルハプティクスをIoAの基幹となる重要な技術と位置付けている.IoAとは,ネットワークを通じて機械・ヒト・操作コンテンツをダイナミックに連結させ,遠隔操作を通じて料理や掃除といった人々の動作を持ち寄る(お互いに提供する)ことや,ネットワークに繋がったロボットが人間のように融通の利く動作を自発的に行ってくれる世界の概念である.IoAの基幹技術となるリアルハプティクスは,人間とロボットとの協創を促進し,社会のさらなる効率化や社会課題解決に貢献することが期待できる.
ドコモは,リアルハプティクスの唯一無二な先進性とIoA実現に向けて必要とされるネットワークとの親和性と発展性に注目し,慶大との研究開発を推進してきた[1].本プロジェクトでは,有線通信を介すことでしか実現できなかったリアルハプティクスの遠隔操作について,セルラ通信を介して実現することに注力している.さらに,ドコモはIoAの世界をより一層広げるためのプラットフォーム開発を進めており,人間の作業をベースとしたリアルハプティクスの拡張機能を検討している.これらの研究開発を通じて,ドコモは,5G Evolution & 6G時代の新たなユースケースの創出と,セルラ通信ならではの利便性が高いソリューションやサービスの提供をめざしている.
本稿では,リアルハプティクスの特徴,本プロジェクトがめざすIoAの姿,セルラ通信を介したリアルハプティクスの実現可能性について解説する.
- 力触覚伝送技術:人間が感じる力触覚をデータとして表し,電気通信を介して伝送する技術.
02. リアルハプティクスの特徴
-
2.1 リアルハプティクスとは
開く
(1)リアルハプティクスの概要
リアルハプティクスは,実在する対象との接触によって生起するリアルな「手応え」を,対象と直接的に接触しない操縦者の側において,ありのままに再現する技術である.触覚*3と力覚*4を同時に呼び起こす手応えは,既存のセンシング技術によって計測するのが困難な事象であるため,従来,暗黙知*5であるとされてきた.しかし,リアルハプティクスは,モータの回転角度である「位置」を基に,モータにかかっている「力」を独自の力推定アルゴリズムによって高速に推定することができるため,「位置」と「力」の情報を組み合わせ,手応えを定量的な情報として形式知*6化できるという特異性がある.
さらに,遠隔操作ロボットにおいてリアルハプティクスは,操縦者のコックピット(以下,リーダー)と,対象と直接接触する被操作ロボット(以下,フォロワー)間で,高速に取得した「位置」と「力」を瞬時に同期させることが可能なため,後述するバイラテラル制御を高水準に満たし,両者間でリアルな手応えを共有できる.操縦者はこの手応えをリモートからでも感じ取ることができるため,直感的にロボットを操作できる.この唯一無二の特性により,リアルハプティクスは人間の繊細な感覚を要する微妙な動作を容易に実現する.また,ロボットの操作を通じて得られる手応えは,形式知化されたデータとして保存・共有できる.これにより,遠隔操作以外の高度なソリューションへの応用にも期待できる.
(2)力触覚量の定義
文献[2]では,力覚や触覚は人間内部で発生する感覚の仕組みに依存するために客観的に表すのが困難であるが,人間が知覚する手応えは力覚と触覚を合わせた力触覚として表され,対象との接触の際に生じるエネルギーの移動によって定量的に記述できると述べている.その力触覚の刺激の大きさは力触覚量として定義されており,力触覚量の瞬時値*7を式(1)として,力触覚量の実効値*8を式(2)として,次のように表すことができる.なお,fは力,vは速度,ΔTは時間窓*9を示す.
(3)バイラテラル制御
正しい力触覚情報を伝えるためには,リーダーとフォロワーは次の2つの機能を同時に満たさなくてはならない[3].
- リーダーとフォロワーが同じ動きをする.すなわち,両者の位置の同期が取れている.
- フォロワーで発生する作用力と,リーダーで発生する反作用力が等しくなる.すなわち,系全体で作用反作用則が成立している.
これらを合わせて透明性と呼ぶ.透明性を満たすためには,リーダーとフォロワーの両者を対等なものとして扱い,各自の位置と力の情報を双方向に伝送させ,同期を取るように制御する必要がある.このような制御方式はバイラテラル制御と呼ばれる.
なお,位置や力の情報の伝送が遅れる場合,所望の透明性は達成されず,力触覚の再現性やロボットの操作性が損なわれる[4].このことは,セルラ通信を介したバイラテラル制御を実現する際に大きくかかわってくる.
2.2 触覚フィードバック技術「ハプティクス」との関連性
(1)ハプティクスの定義と特徴
ハプティクスは触覚フィードバック技術や皮膚感覚フィードバック技術と呼ばれている.その定義を一意にまとめることは難しいが,力・振動・動きなどをアクチュエート*10できるデバイスを用いて人工的に感触を作り出し,デバイス利用者に疑似的な感触を与える技術,という説明が多くみられる.
多くのヒトが体験済みであろうハプティクスの活用例として,ビデオゲームのキャラクター操作やスマートフォンの文字入力などが挙げられる.これらにおいて,ユーザはゲームコントローラーやスマートフォンに内蔵されたアクチュエーターから振動触覚フィードバックを得ることができる.前者は,ビデオゲーム内で操作しているキャラクターのアクションに応じた感触のフィードバックをユーザに与える.後者は,ボタンとしての機構を備えないディスプレイをユーザの動作に応じて振動させ,あたかもボタンを押し込んだような感触のフィードバックをユーザに与える.
このようにハプティクスは,実際の刺激とは異なる代替的なアクチュエーターの刺激によって触覚を疑似的に再現するものであり,ユーザを錯覚させることを得意とする.そのため,ビデオゲームやVR(Virtual Reality)などとの親和性が非常に高い.
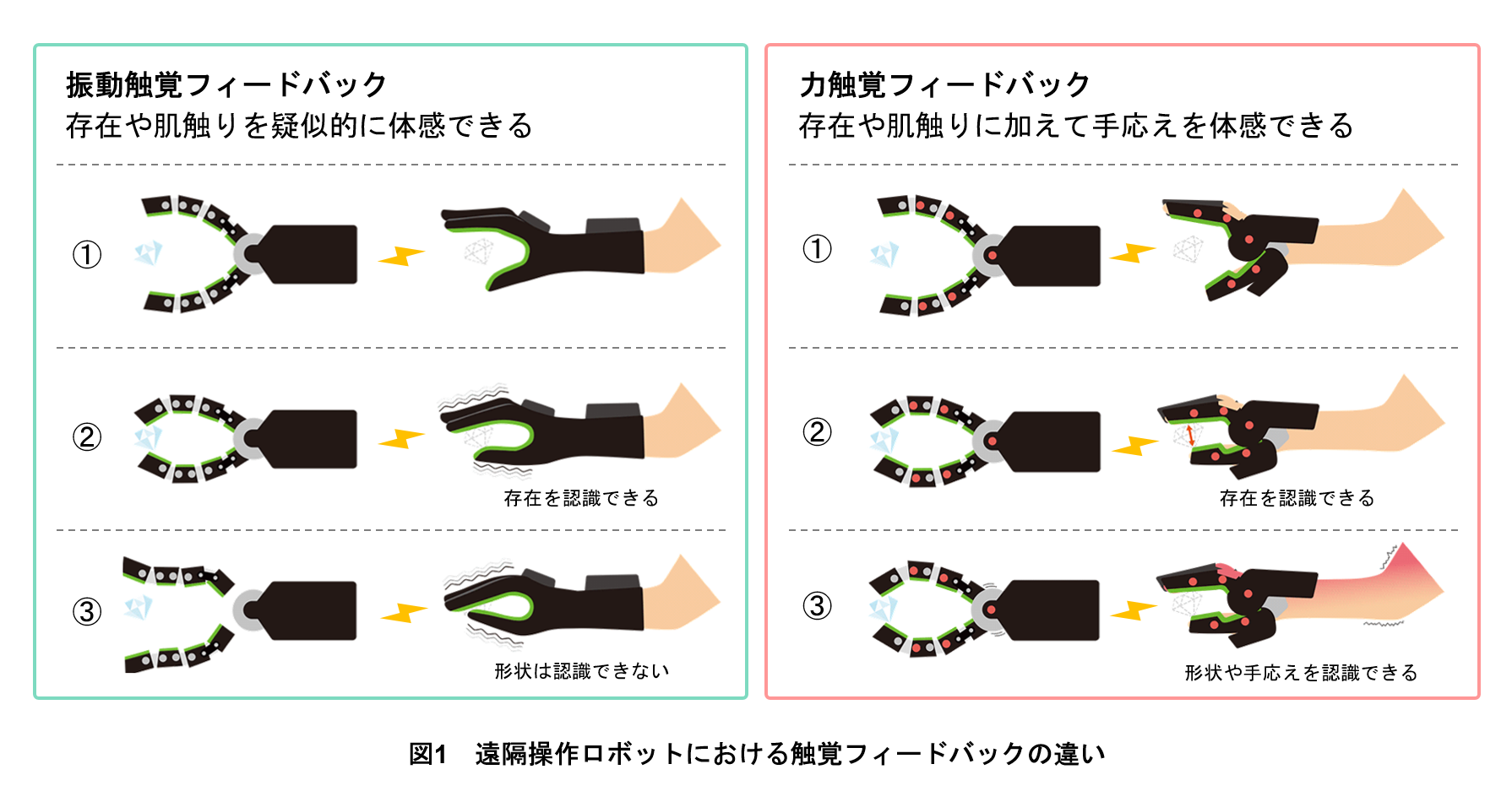
(2)遠隔操作ロボットにおける触覚フィードバックの比較
リアルハプティクスはバイラテラル制御の精度を高めるための技術であるが,触覚フィードバック技術の一種であるともいえる.遠隔操作ロボットにおける振動触覚フィードバックと力触覚フィードバックの比較例を図1に示す.振動触覚フィードバックの場合,操縦者はアクチュエーターの振動を通じて遠方のダイヤモンドの存在や疑似的な肌触りを体感することができる.しかし,力加減は勘案されていないため,操縦者はダイヤモンドの形状を認識できるような手応えを得ることができない.一方,力触覚フィードバックの場合,存在や肌触りのみならず,リアルな力加減がリーダー・フォロワー間で共有されるため,操縦者はダイヤモンドが存在していないにもかかわらず,硬くて握り潰せないような,実際にダイヤモンドを握った手応えを得ることができる.
- 触覚:人間と対象が軽く触れ合うときに生起する感覚.ここでは,力覚と区別される.
- 力覚:対象が人間に,あるいは人間が対象に力を及ぼすときに生起する感覚.ここでは,触覚と区別される.
- 暗黙知:言葉や数値によって定義することが難しい主観的な知識.
- 形式知:言葉や数値によって定義することができる客観的な知識.
- 瞬時値:ある時点における瞬間的な値.
- 実効値:本稿では,力触覚量の瞬時値を時系列に波形化したものから,交流の電圧または電流の表現方法に使われる実効値の定義に基づいて導出した数値のこと.ある波形に対して二乗・平均・平方根をとるような定義であるため,RMS(Root Mean Square)値とも呼ぶ.時間によって大きく変動する力触覚量をデータとして取り扱うのに適した表現である.
- 時間窓:時系列データのうち,一部の区間を切り取った部分のこと.タイムウィンドウとも呼ぶ.
- アクチュエート:人間や環境に対して,物理的に影響を及ぼすこと.
03. セルラ通信との融合により実現できる世界
-
前述したIoAの世界を広げるには,リアルハプティクスとセルラ通信の融合が必要不可欠 ...
開く
前述したIoAの世界を広げるには,リアルハプティクスとセルラ通信の融合が必要不可欠である.このIoAの世界は2つの方向性があり,以下ではそれぞれの方向性にセルラ通信を関連付けた世界観を述べる.
3.1 手応えのある遠隔操作サービスのエリア拡大
IoAの世界には,ネットワークを通じて機械・ヒト・操作コンテンツをダイナミックに連結させ,遠隔操作を通じて人々の動作を持ち寄ることをめざす,という第1の方向性がある.この方向性にセルラ環境のケーブルレス性やモビリティ性を組み合わせることで,屋外のあらゆるエリア,一般家庭などの固定回線品質にばらつきがあるエリア,ネットワークケーブルを張ること自体が物理的に難しい特殊なエリアなどへ,以下のような価値を提供できる.
(1)専門性の高い作業者の技をどこへでも迅速に提供可能
昨今,デスクワークのリモート化が進んでいるが,現地対応が必要な作業は依然として存在している.例えば,訪問診療,水漏れ修理,救命活動など数多くの作業が考えられる.訪問が伴う作業では,各家庭を順番に回る手間がとても大きい.専門家による緊急対応が必要な作業では,専門家の移動時間の分だけ対応が遅れてしまう.このような状況に対し,精密な遠隔操作とセルラ通信を組み合わせ,各家庭に常駐させたロボットを専門家が遠隔操作するような体制を取ることで,プロの技をどこへでも迅速に提供するような新しいサービスが可能である.
(2)人的被害を遠隔操作で回避可能
現在の日本では,人間にとって過酷な環境で行われる現場作業が数多く存在する.例えば,火傷の危険性がある熱源付近での作業,熱中症や落下の危険性がある建設現場での作業,人体に有害な物質で汚染された現場での作業など,私たちの生活を支えている作業員はさまざまなリスクを伴いつつ作業を行っている.あらゆる環境で精密な遠隔操作が可能となれば,作業員たちが抱える生命の危険や健康被害のリスクを限りなく減らすことが可能となる.
3.2 手応えを含む作業情報の拡張利用
IoAの世界には,動作情報をコンテンツとして取り扱い,いつでも好きなときに適した動作を活用できることをめざす[5],という第2の方向性がある.この側面にMEC(Multi-access Edge Computing)*11サーバなどを組み合わせることで,手応えのある遠隔操作を行った際の動作情報をサーバに蓄積・他のユーザに共有することが可能となり,そのコンテンツデータを拡張利用する形で以下のような価値を提供できる.
(1)人間の作業をベースとしたロボットの自動制御
リアルハプティクスによって人間の力加減が形式知化でき,ロボット側の力加減の制御ルールを論理的に定められるため,精密な作業が可能な自動化ロボット開発を促進させることができる.
昨今では,自律走行ロボット(AMR:Autonomous Mobile Robot)*12が市場に導入され始めており,オフィスビルでの清掃作業,レストランでの配膳作業といったフィールドにおいて,人間と協調する形で人的作業の効率化に成功している.しかしながら,これらのロボットですべての人的作業を自動化できているわけではなく,精密な作業などは未だ手作業で行われている.今後を見据えると,過渡期の段階では,人間が遠隔操作した際の作業動作情報を教師データとして蓄積する必要があるが,人間の知能を模した制御AIが確立すれば,単純作業をすべて自動化できる未来が現実味を帯びてくる.
(2)リアルな手応えを仮想空間で再現
遠隔操作を介してモノに力を与えたときにフィードバックされる手応えを力触覚フィードバックモデルとして再構築することで,リアルな手応えを仮想空間で再現できる.遠隔操作でモノを触った感触をMECに蓄積していくことで,力触覚図鑑のような知育的利用,ネットショッピングでの手応え確認,メタバース*13空間での手応え再現など,さまざまな可能性に繋げることができる.
- MEC:ユーザに近い位置にサーバを設置したシステムのこと.通常サーバはインターネット上に設置されるが,MECサーバはキャリア網内に設置することで,遅延を減らすことができる.これにより,通信の応答速度(レスポンス)を大幅に向上させる.
- 自律走行ロボット(AMR):センサなどで経路を把握し,自律的に走行できるロボット.障害物を自律的に判断できるため,経路の再設定や人間と協調することを得意とする.
- メタバース:コンピュータネットワークに構築された3次元の仮想空間およびそれを利用したサービス.
04. セルラ通信での実現可能性
-
4.1 4Gでの実験を踏まえた課題
開く
リアルハプティクスを活用した遠隔操作ロボットはリーダーとフォロワーの動きを常に同期させる必要があるため,通信遅延がロボットの制御性能に大きく影響を及ぼすことが明らかになっている.ただし,有線ネットワーク環境かつ日本国内での利用であれば,ロボットの制御性能へ影響を及ぼさない程度の通信環境が整えられているため,リアルハプティクス技術を十分に活用できる.
ドコモでは,セルラ通信においてもリアルハプティクス本来の能力を発揮し,直接接触と遜色の無い手応えが得られる遠隔操作の実現を目標としている.しかし,基地局装置と端末装置の無線通信区間で発生する遅延ゆらぎ*14が原因で,ロボットを正常に操作できないことが,セルラ通信を介した実験で明らかになっている.
一対一の音声通話やビデオ通話はキャッチボール形式のコミュニケーションであり,話し手と聞き手の状態を寸分違わず同期する必要はなく,違和感なく会話を実施するための許容遅延基準をこれまでの第4世代移動通信システム(4G)で満たせる.しかし,力触覚伝送は触覚情報を常にリーダーとフォロワーの間で同期し続ける必要があり,許容遅延条件が厳しい.この力触覚伝送に4Gを用いた場合は,遅延要件を満たせず,ロボットが徐々に制御不能な状態になってしまう.従って,セルラ通信における力触覚伝送を用いた遠隔操作を実現するためには,無線通信区間で発生する遅延ゆらぎを限りなく抑えた無線通信技術が必要となる.
4.2 5GのURLLCを活用した実証実験
ドコモでは,基地局装置と端末装置の無線通信区間で発生する遅延ゆらぎを限りなく抑制可能な第5世代移動通信システム(5G)の高信頼・低遅延通信(URLLC:Ultra-Reliable and Low Latency Communications)*15に着目し,セルラ通信でのリアルハプティクス実現可能性検証を行った.本実験では,この無線通信区間においてURLLCならびに5Gの高速大容量通信(eMBB:enhanced Mobile BroadBand)*16の要件を満たすパラメータ設定を基地局と端末相当の実験装置に適用し,遠隔操作ロボットの操作性を比較する.
(1)実験概要
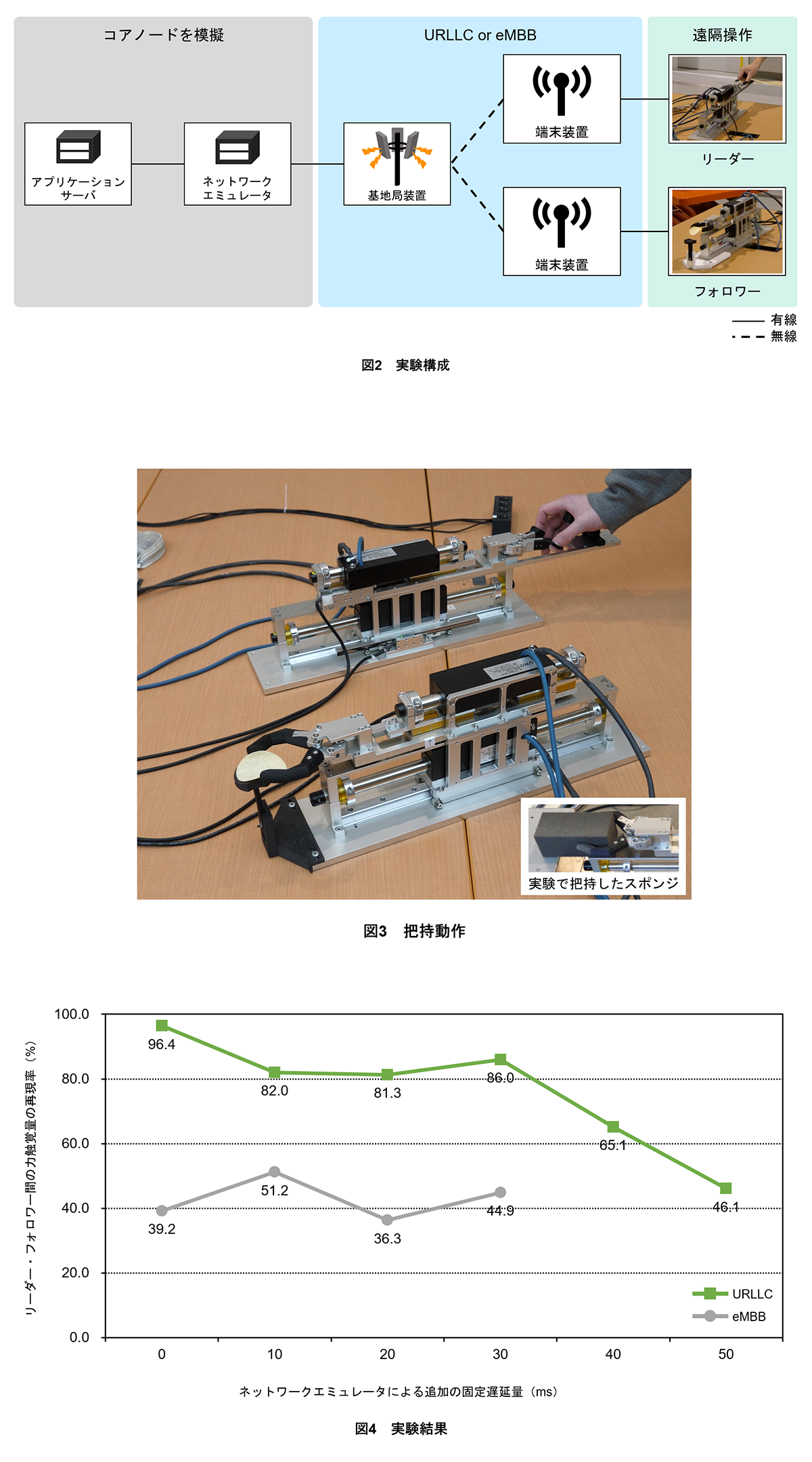
リアルハプティクスを用いたロボットの遠隔操作が可能で,かつURLLCまたはeMBBの要件を満たす実験装置を介してネットワーク装置を構成した.その構成を図2に示す.リーダーとフォロワーのそれぞれが送信したパケットは,端末装置・基地局装置間の無線通信区間を経て,アプリケーションサーバに通される.アプリケーションサーバはリーダーとフォロワーが力触覚情報を双方向に共有することができるよう,リーダーから受け取ったパケットをフォロワーへ,フォロワーから受け取ったパケットをリーダーへ転送する制御を実施する.また,アプリケーションサーバと基地局装置の間に介在するネットワークエミュレータ*17は,伝送距離の長さが及ぼす遅延の影響を模擬するために,パケットに対して固定遅延*18を適宜追加する.
(2)評価項目
本実証実験では,図3に示すようなスポンジを把持した際に発生する力触覚量の再現率を評価項目とする.力触覚量の再現率は前述のとおり定義した実効値の式(2)を基に,次式で定義される.

式(3)は,リーダーとフォロワーそれぞれに働く位置・力・速度の誤差の百分率となり,100%に近いほど性能が良いことを示す.つまり,遠方側で知覚した手応えに対し,通信を介して手元側で知覚した手応えの鮮明度合いを表す.
(3)実験結果と考察
リーダー・フォロワー間における力触覚量の再現率を図4に示す.
URLLCによる無線通信を適用し,かつ固定遅延を追加しない場合,力触覚量の再現率は最大で96.4%に達する.この再現率は有線通信のみを介することで得られる再現率とほとんど同じであり,ここでは本物の物体を直接つかむ手応えに限りなく近い感触が再現されていることになる.さらに,固定遅延の追加量が30ms以下の場合,再現率は80%を上回る.これらの結果は,無線通信区間における遅延ゆらぎの程度が軽微であるために,リーダー・フォロワー間において高精度のバイラテラル制御がなされ,高い透明性が達成されたことを示唆するものである.パケットログ解析を実施したところ,URLLCの場合は後述のeMBBの場合と比較して遅延ゆらぎが大幅に抑制されることが確認された.
他方,eMBBによる無線通信を実施する場合,適宜追加される固定遅延の量にかかわらず,力触覚量の再現率は平均43%にとどまる.この結果は,高速大容量に重きを置いた通信技術では,無線通信区間における通信遅延ならびに遅延ゆらぎの影響によりバイラテラル制御の精度が損なわれるために,リアルハプティクスによる精細な手応えの再現が困難であることを裏付けるものである.なお,固定遅延の追加量が40ms以上の場合,ロボットが制御不能な状態となったため,データ取得自体が困難な状態であった.
以上の結果から,URLLCを適用した場合は,直接モノをつかんだ手応えを遜色なく再現可能であるため,eMBBでは安定が困難だったリアルハプティクスを活用した無線遠隔操作の実現可能性を高められることが分かった.
- 遅延ゆらぎ:無線通信区間におけるスケジューリング・再送処理などが主な理由で引き起こされる遅延のこと.固定遅延と可変遅延に分けられ,可変遅延の変化度合いのこと.ジッタ(jitter)とも呼ぶ.
- 高信頼・低遅延通信(URLLC):5Gの要件の1つで,高信頼かつ低遅延な無線通信を実現する技術.
- 高速大容量通信(eMBB):5Gの要件の1つで,高速かつ大容量な無線通信を実現する技術.
- ネットワークエミュレータ:ネットワーク上で発生する遅延,ゆらぎ,パケット損失などのさまざまな事象を再現できる装置.
- 固定遅延:光ケーブルなどの伝送系を電波または電気信号が通過する際の伝搬遅延が主な理由で引き起こされる,持続する遅延のこと.
05. あとがき
-
本稿では,リアルハプティクスについて,世間で広く知られているハプティクス技術との ...
開く
本稿では,リアルハプティクスについて,世間で広く知られているハプティクス技術との関連性,セルラとの融合で実現できる将来のユースケース,セルラ通信での実現可能性を解説した.今後の展望として,5G Evolutionや第6世代移動通信システム(6G)の要件として期待されている低遅延化に関する制御機能に着目し,セルラ通信での実現可能性検証を重ねてリアルハプティクスの実用化をめざす.また,セルラで実現するIoAの第一歩として,リアルハプティクスのユニーク性を追求し,セルラ通信を用いたソリューション提供に向けてプラットフォーム開発を加速させる.
最後に,本プロジェクトの取組みおよび本稿執筆に協力いただいた慶應義塾大学ハプティクス研究センターに感謝の意を表する.
-
文献
開く
- [1] 高畑,ほか:“リアルタイムロボティクスによるハプティック通信技術,”本誌,Vol.15,No.3,pp.53-56,Oct. 2007.
https://www.docomo.ne.jp/corporate/technology/rd/technical_journal/bn/vol15_3/053.html - [2] 大西 公平,ほか:“ハプティクスとその応用 ―力触覚の伝送・記録・再現・表示―,”株式会社シーエムシー出版,2022.
- [3] 大西 公平,斉藤 佑貴,福島 聡,松永 卓也,野崎 貴裕:“リアルハプティクスの拓く未来社会,”日本AEM学会誌,Vol.25,No.1,pp.9-16,2017.
- [4] 鈴木 敦,大西 公平:“通信遅延下におけるバイラテラル遠隔操作の再現性と操作性,”電気学会論文誌D(産業応用部門誌),Vol.133,No.7,pp.738-746,2013.
- [5] 野崎 貴裕,半谷 聡:“テレイグジスタンスとリアルハプティクス —人間と機械の融合が拓く新たな未来—,”日本ロボット学会誌,Vol.36,No.10,pp.668-672,2018.

