

5G Evolution & 6G特集(2) —具体化に向けた取組みとユースケース—
新しいコミュニケーションを実現する人間拡張基盤
人間拡張 動作共有 触覚共有
宮浦 峻平(みやうら しゅんぺい)
天野 貴行(あまの たかゆき)
6Gネットワークイノベーション部
あらまし
ドコモでは,「ドコモ6Gホワイトペーパー」に示した6G時代の新たな提供価値の1つである「人間拡張」,すなわちネットワークで人間の感覚の拡張を実現するための基盤開発を行っている.6G時代では,人の脳や身体の情報をネットワークに繋ぐことで,あたかもネットワークの先に実際にいるような感覚を体験させることを可能とし,これによりさまざまな社会課題に対して新たな価値観や解決策を提供すると予想される.本稿では,こうした感覚や動作,スキルの情報を相手へ共有することができる「人間拡張基盤®*1」について解説する.
- 人間拡張基盤:人間拡張基盤®およびFEEL TECH®は,(株)NTTドコモの登録商標.
01. まえがき
-
第6世代移動通信システム(6G)の特徴的な技術の1つである超低遅延化の ...
開く

第6世代移動通信システム(6G)の特徴的な技術の1つである超低遅延化の実現により,6Gではネットワークの通信速度が神経の反応速度を超える.そのため,脳や身体の情報をネットワークに接続することにより,ネットワークを介して人間の感覚を拡張することが可能になると考えられる[1].従来,人の能力を強化する技術全般を「人間拡張」と呼ぶ[2]が,ドコモが開発する人間拡張基盤では,パワードスーツなどによる筋力の増強よりも,時間や空間を超えた体験の共有に焦点を当てている.これまでにも人間拡張の研究は多数行われているが,概して要素技術を提案するものであった.これらの技術はいずれも個々のデバイスやサービスの開発に焦点を当てている.これに対し,ドコモは人間拡張のための基盤技術の構築をめざしている.
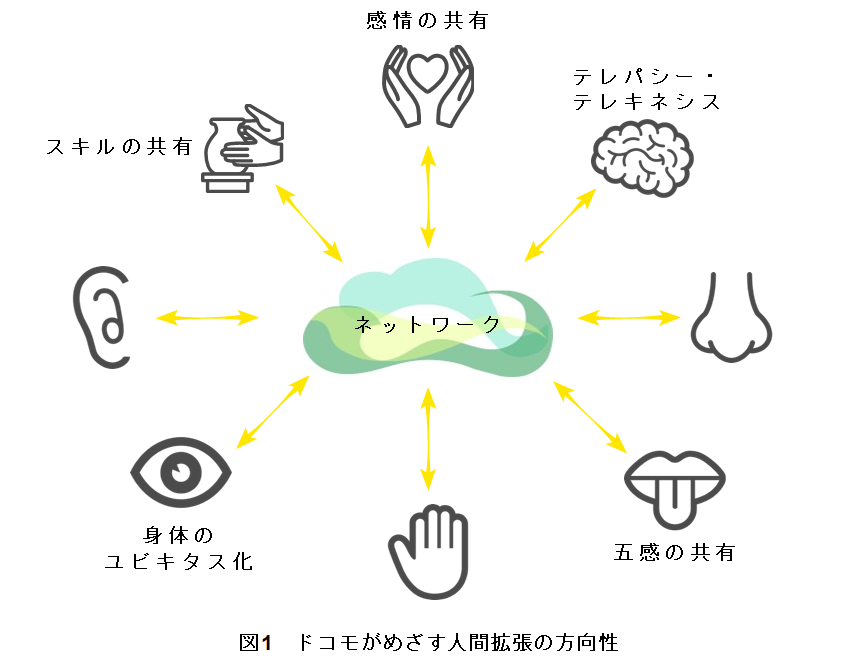
ドコモでは,人間拡張として「身体のユビキタス化」「スキルの共有」「感情の共有」「テレパシー・テレキネシス」「五感の共有」の実現をめざしている(図1).本稿では,人間拡張基盤の概要を述べ,上記5点のうち身体のユビキタス化,スキルの共有の実現に向けて開発した技術である「動作共有」と,五感の共有の実現に向けて開発した技術として,人間の五感の1つである「触覚」の共有について解説する.
02. 人間拡張基盤の概要
-
本システムの全体構成は,人の状態を把握する機器(センシングデバイス) ...
開く
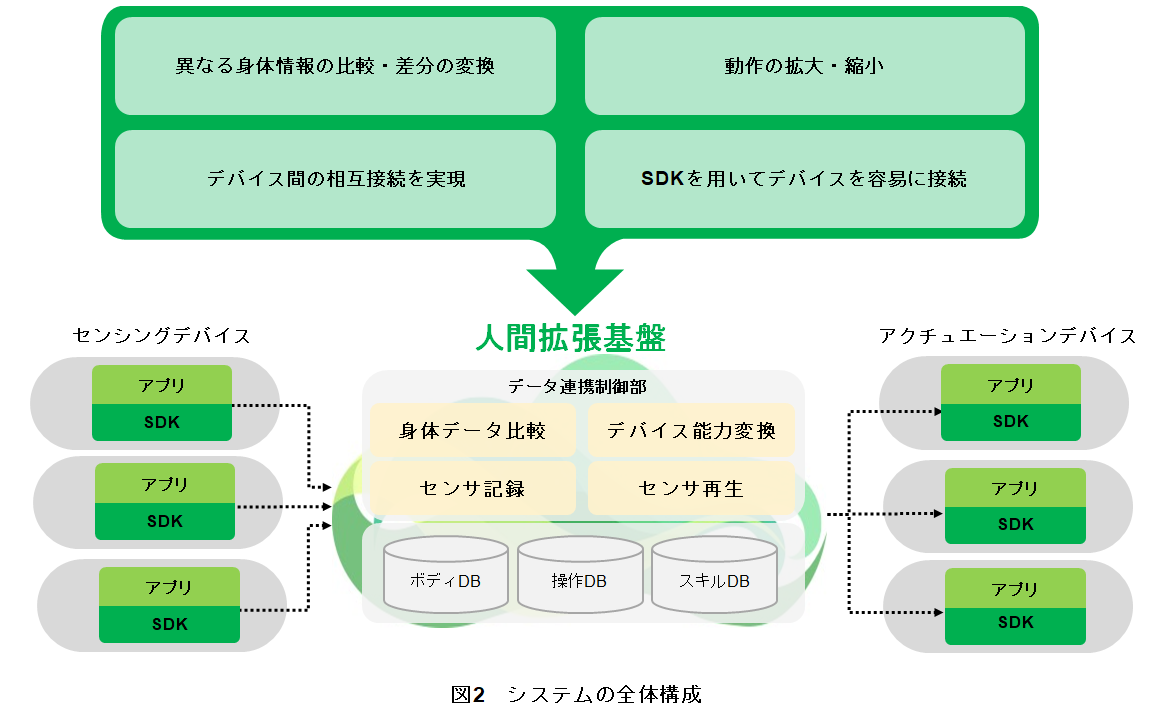
本システムの全体構成は,人の状態を把握する機器(センシングデバイス),把握した状態をほかの身体で再現させる駆動機器(アクチュエーションデバイス*2),両者を結びつける人間拡張基盤からなる(図2).人間拡張基盤では,センシングされた情報とアクチュエーションデバイス側の身体情報を比較し,その差分をセンシング情報に適用した上で,適用後の情報をアクチュエーションデバイスに伝える.例えば,身体の可動範囲に合わせて適切な形で動作共有を行う,あるいは触覚感度に合わせてより認識しやすい触覚を提示するといったことが可能である.また,共有する動作の大きさは拡大・縮小可能である.すなわち,人間拡張基盤は大きさや骨格の異なる人間やロボットとの間の無理のない自然な動作共有や,大きな動作を基にきめ細やかな動作を再現する,といったことを実現する.また,人間拡張基盤にはパートナー企業のさまざまなデバイスの相互接続も可能であり,人間拡張基盤に簡易に接続できるSDK(Software Development Kit)*3を提供することで,センシングやアクチュエーション技術をもつパートナー企業と連携を進める.
- アクチュエーションデバイス:センシングデバイスが外界の物理運動などを感知して信号に変換する装置であるのに対して,アクチュエーションデバイスは内部の信号に応じてモータなどの物理運動を発生させ外界に働きかける装置全般を指す.
- SDK:アプリケーションを作成するときに必要となる,ドキュメント,ツール,ライブラリ,サンプルプログラムなどからなる開発キット.
03. 動作共有
-
動作共有では,人の動きを他者やロボット,アバターと共有する.例えば ...
開く
動作共有では,人の動きを他者やロボット,アバターと共有する.例えば,遠隔地にあるロボットに自分と同じ動作を共有することで,あたかも自分が現地にいるかのようにロボットに作業させることが可能になる.また,一連の動作をスキルとして記録し,任意のタイミングで再生,また他者と共有することも可能である.この動作共有を応用することで,将来的には情報機器にさまざまなアプリケーションをダウンロードして利用するかのように,さまざまなスキルをダウンロードし,自身の身体で利用することも期待できる.
3.1 システムの構成
動作共有システムは,人の動作を把握するセンシングデバイス,把握した状態を他者やロボットで再現するためのアクチュエーションデバイス,および両者を結び付ける人間拡張基盤から構成される.
- センシングデバイス
動作の検出デバイスとして,ドコモのパートナー企業であるH2L株式会社(以下,H2L社)が開発したFirstVR[3]を写真1に示す.このデバイスは筋変位センサ*4や加速度センサ*5を用いて,装着した部位の動作を検出する. - アクチュエーションデバイス
H2L社のアクチュエーションデバイスであるPossessedHand®を写真2に示す.このデバイスは,筋肉を電気で刺激して任意の動作に誘導する技術[4]を利用する. - 人間拡張基盤
人間拡張基盤では,動作を共有する身体同士の可動域を比較することで,適切な範囲で動作を共有する.例えば,可動域が狭くなっている人に対して,身体的に負荷の少ない範囲で動作を共有することなどが期待できる.また,センシングデバイスから取得した一連の動作情報をスキルとして保存,任意のタイミングでアクチュエーションデバイスを介して動作を共有する.この際,前述と同様に身体の可動域を考慮した処理を行う.

3.2 人間拡張基盤の動作
動作共有を行うときは,センシングされた操作情報を登録する操作DB(Data Base),身体情報を登録するボディDB上の操作情報と身体情報に基づきデータ連携制御部がアクチュエーションの制御を行う.データ連携制御部は,ボディDBに事前登録された動作を共有する対象同士の身体情報の可動範囲に基づき,操作DB上のセンシングデータを用いて,アクチュエーションを制御する.
例えば,動作を共有する2人(A,B)の右腕を内転できる範囲がAは0~120°,Bは0~90°とする.AからBに60~110°までの動作共有のための制御情報が届いた場合,従来の技術ではBの可動範囲を超えて110°まで動かそうとするが,人間拡張基盤ではデータ連携制御部の制御により,制限された動きとなるように,Bの可動範囲である60~90°に制御情報を修正する.つまり,腕の可動範囲を制御して身体に無理のない範囲での動作共有が可能になる.
スキルの共有を行うときは,動作共有時の構成に加え,動作の時系列情報を記録するスキルDBを介して,データ連携制御部が制御を行う.スキルDBには,記録開始の操作から記録停止操作が行われるまで,センシングデバイスから取得された動作情報が記録される.この記録には,センシングに用いられたデバイスと対象の身体情報が関連づけられている.その後,データ連携制御部が任意のタイミングにてスキルDBから動作情報を取得(再生)してアクチュエーション制御を行う.この際,データ連携制御部は動作共有時と同じく身体情報を考慮した上でアクチュエーションが実施される.
- 筋変位センサ:力の入れ具合に関する筋肉の状態を検知するセンサ.自らの腕や手の動きからロボットなどを自在に操作することにも使われている.
- 加速度センサ:姿勢(傾き)や,直線方向の加速の程度を知るためのセンサ.同様に回転方向の加速を知る角加速度センサもある.ナビゲーションやカメラの手ぶれ補正のほか,体感ゲームの入力にも使われている.
04. 触覚共有
-
触覚共有では,人間の五感の1つである触覚において,既存メディア技術で ...
開く
触覚共有では,人間の五感の1つである触覚において,既存メディア技術で実現されている「見る」「聞く」に加えて「触り心地」の共有を実現する.ドコモは,モノに触れたときの触覚を,人間拡張基盤で相手の感じ方に合わせて共有する技術「FEEL TECH®」を開発した.これにより,映像や音,文字による表現では伝えきれなかったモノの触り心地を共有することをめざす.将来的には,本技術を応用することで医療や伝統工芸などへの活用,例えば,遠隔地のロボットを介して医師が触診を行うことも期待できる.
4.1 システムの構成
FEEL TECHシステムは,人がモノに触れたときの触覚を把握するセンシングデバイス,把握した触覚を他者で再現するアクチュエーションデバイス,および両者を結び付ける人間拡張基盤から構成される.
- センシングデバイス
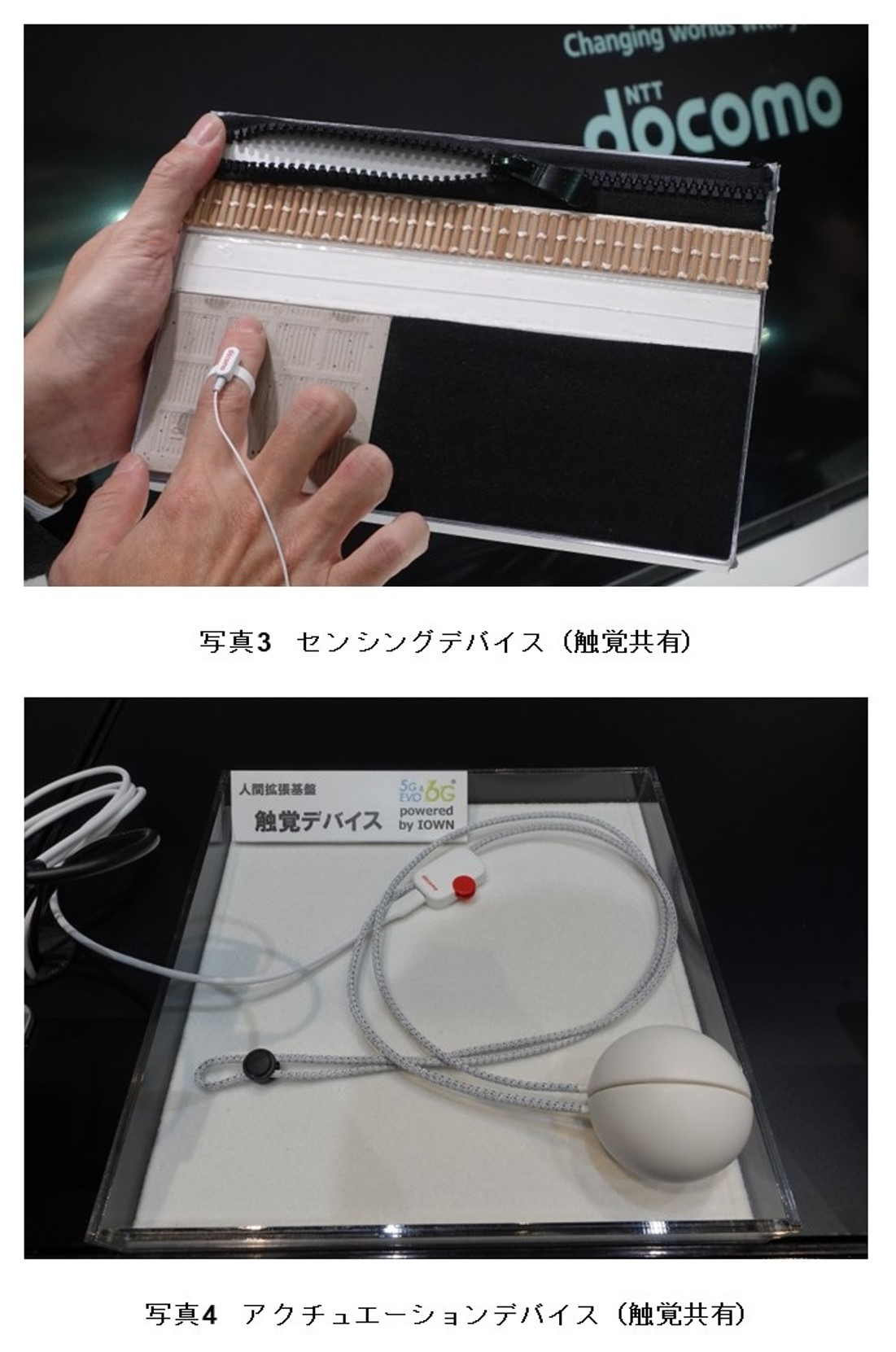
触覚の検出として,ドコモのパートナーである国立大学法人名古屋工業大学大学院工学研究科Haptics Labが開発したセンシングデバイスを写真3に示す.このデバイスは,圧電素子を用いて人がモノに触れたときの振動をセンシングしている. - アクチュエーションデバイス
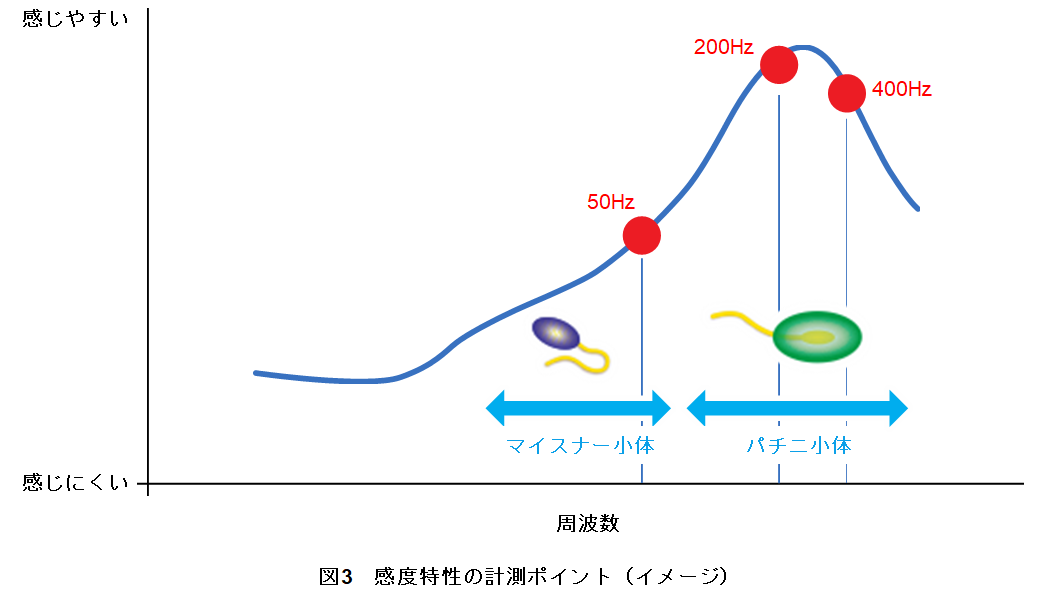
触覚共有として,ドコモのパートナーである慶應義塾大学大学院メディアデザイン研究科が開発したアクチュエーションデバイスを写真4に示す.このデバイスは,振動子を用いて触り心地を再現している. - 人間拡張基盤
人間拡張基盤は,センシングデバイスとアクチュエーションデバイスの間で触覚の感度に対する個人差を加味した情報変換を行う.これにより,触覚感度の低い人でも触覚感度の高い人が感じている触り心地の違いを知覚できるようになる.
4.2 人間拡張基盤の動作
触覚共有を行うときは,センシングされた触覚情報を登録する操作DB,身体情報となる個人の感度特性を登録するボディDB上の操作情報と身体情報に基づきデータ連携制御部がアクチュエーションの制御を行う.データ連携制御部は,ボディDBに事前登録された触覚の感度特性に合わせて,操作DB上のセンシングデータを用いてアクチュエーションを制御する.まず,個人の感度特性を事前に計測する.具体的には,利用者に3点の異なる周波数での振動を提示し,各周波数において知覚できる最小の振幅を計測する.この3点の計測周波数は,図3のグラフにおいては,触覚のうち振動にかかわる皮下のセンサであるマイスナー小体*6とパチニ小体*7などが関与する箇所となる.次に,事前に記録した個人の感度特性に基づき触覚を共有する.例えば,触覚を共有する2人(A,B)の計測結果が,Aは感度が高く,Bは感度が低いとする.触覚をAからBへ共有する際,Bへ伝達される触覚は,データ連携制御部の制御により感度の低いBに合わせて振動が増幅される.つまり,感度の低いBも,モノに触れた際の触り心地の違いを感度の高いAと同様に感じることが可能となる.
- マイスナー小体:皮膚の内部にある受容器の1つ.点字などの凸凹(でこぼこ)の振動刺激を知覚する.
- パチニ小体:皮膚の内部にある受容器の1つ.やすり,シルクなどの,ザラザラ,サラサラの振動刺激や衝突感を知覚する.
05. あとがき
-
本稿では,「人間拡張基盤」の概要ならびに「動作共有」「触覚共有」の実現に ...
開く
本稿では,「人間拡張基盤」の概要ならびに「動作共有」「触覚共有」の実現に向けて開発した技術を解説した.なお,人間拡張基盤には前述の身体情報の差分吸収や記録,再生だけでなく,デバイスの管理機能やサービスUI(User Interface)も具備する.また,前述のデータ以外にもさまざまな感覚量を同一の基盤上で扱う.これにより,デバイスメーカやサービスプロバイダの開発,保守,運用の工数を軽減し,より多くの人間拡張サービスを創出することが期待できる.
そのほか,認知度向上や将来のパートナー企業の探索の一環として,展示会などでの技術出展も行っている.2022年度は,docomo Open House'23[5]やMWC(Mobile World Congress) Barcelona 2023[6]において人間拡張基盤を展示した(写真5).展示の様子は国内の各キー局だけでなく海外各国のメディアでも取り上げられたことから,国や文化に依存しない人間拡張基盤の魅力を発信できたものと考えている.
今後は触覚以外の五感の共有や感情の伝達などをさらに拡張することで,映像や文字だけでは理解しきれない情報を共有し,伝えたくても伝えきれなかった気持ちや身体記憶,体験を繋ぐことで,ドコモは「解り合う」世界をめざし取り組んでいく.

-
文献
開く
- [1] NTTドコモ:“ドコモ6Gホワイトペーパー 第5版,” Nov. 2022.
- [2] J. Rekimoto:“Internet of abilities: Human augmentation, and beyond (keynote),”2017 IEEE Symposium on 3D User Interfaces (3DUI), Apr. 2017.
- [3] H2L株式会社:“FirstVR | あなたの手が,世界を動かす --- VRは,直感で操作する領域へ.”
http://first-vr.com/
- [4] E. Tamaki, T. Miyaki and J. Rekimoto:“PossessedHand:Techniques for controlling human hands using electrical muscles stimuli,”In Proc. of the SIGCHI Conference on Human Factors in Computing Systems, May 2011.
- [5] NTTドコモ:“docomo Open House'23.”
https://www.docomo.ne.jp/corporate/technology/rd/openhouse/openhouse2023/ - [6] GSMA MWC:“MWC Barcelona 2023.”
https://www.mwcbarcelona.com/

