

5G Evolution & 6G特集(2) —具体化に向けた取組みとユースケース—
C-V2Xを活用した協調型自動運転に向けたドコモの取組み
協調型自動運転 C-V2X SIP-adus
丸小 倫己(まるこ ともき)† 神保 雄祐(じんぼ ゆうすけ)
佐藤 恒太郎(さとう つねたろう) 河津 大志(かわつ ひろし)
牧野 寿之(まきの としゆき) 徳安 朋浩(とくやす ともひろ)
6Gネットワークイノベーション部
† 現在,R&D戦略部
あらまし
より安全・快適な車社会の実現に向けて,車載センサで検知困難な情報を通信で取得することにより高度な自動運転を可能とする,協調型自動運転が期待されている.内閣府の戦略的イノベーション創造プログラムの自動運転への取組み(SIP-adus)では25個の協調型自動運転ユースケースが明確化され,社会実装に向けたさらなる検討の加速が望まれている.ドコモでは協調型自動運転の通信方式として,LTE/5Gの通信技術を活用したC-V2Xに着目して検討を進めている.本稿ではSIP-adusの検討内容などの外部動向に触れるとともに,C-V2X実証実験などのドコモの取組みについて解説する.
01. まえがき
-
ほかのクルマや,信号機のようなインフラ設備など,さまざまなものと ...
開く

ほかのクルマや,信号機のようなインフラ設備など,さまざまなものと無線で繋がる「つながるクルマ(コネクテッドカー(Connected Car))」の登場による,より安全・快適な車社会の実現が期待されている.例えば,自動走行の高度化による交通事故の低減,収集した多数の車両データに基づく最適経路選択による渋滞緩和,ビックデータ解析*1による新たなサービスの創出,車内エンターテインメントの多様化による快適な移動空間の実現などが挙げられる[1].もはやクルマは単なる移動手段ではなく,移動可能な新しい生活空間となる将来が見えてきている.
通信による高度な自動走行の実現に向けた主要な産学官連携自動運転プロジェクトの1つとして,内閣府の戦略的イノベーション創造プログラムSIP(Cross-ministerial Strategic Innovation Promotion Program)の自動運転への取組み(SIP-adus:SIP-Automated Driving for Universal Service)がある[2].SIP-adusでは,車載センサで検知できない死角情報などを通信で取得することにより,自律走行を補完する協調型自動運転に関する検討が行われた.その中で,国内外で検討されているユースケースを集約・整理し,さまざまな交通シチュエーションを想定した25個の協調型自動運転ユースケースが明確化され[3],これらに対する既存通信方式の適用検討が実施された.その結果,路側インフラがクルマに情報配信を行うユースケースなどについては,既存通信方式で実現可能だったが,クルマ同士で連携しながら速度調整などを必要とするユースケースに関しては,新たな通信方式の導入と周波数の確保が必要とされた[4].
2020年に総務省より公表された周波数再編アクションプランにおいて,新たな周波数として,国際協調の観点から世界的なITS(Intelligent Transport Systems)*2バンドである5.9GHz帯が有望視されており,総務省による5.9GHz帯にかかわる技術試験事務*3の実施,「自動運転時代の“次世代のITS通信”研究会」の開催など,新たなルール作りに向けた検討が進められている[5][6].
ドコモでは,コネクテッドカーサービスの実現・拡大に貢献するために,LTE/5Gの通信技術を活用した新たな通信方式であるセルラV2X(C-V2X:Cellular-Vehicle to Everything)に着目して検討を進めている.具体的には,C-V2Xの可用性評価のための実環境を模擬した街レベルシミュレータを構築し,またパートナー共創によるユースケース拡大に向け,千葉県柏市柏の葉に実証環境を構築し,C-V2Xの実証実験を実施している.
本稿では,SIP-adusの検討内容や国内外の5.9GHz帯周波数動向などについて触れつつ,現状のドコモのC-V2Xを活用した協調型自動運転に向けた取組みについて解説する.
- ビックデータ解析:膨大かつ多種類のデジタルデータを人工知能などにより解析し,データの傾向や特徴を抽出すること.
- ITS:通信技術を用いて,車両管理や道路交通などを快適にする道路交通システム全体の総称.
- 技術試験事務:電波を有効利用できる可能性の高い技術の早期導入に向けて,技術基準を策定するための技術的検討に係る総務省の取組み.
02. 協調型自動運転
-
2022年度に完了したSIP-adus第2期では,自動運転の実用化対象を高速道路から ...
開く
2022年度に完了したSIP-adus第2期では,自動運転の実用化対象を高速道路から交通環境がより複雑な一般道へと拡張することをめざして,協調型自動運転に関する検討が行われた[4].協調型自動運転では,想定される通信方式の1つとして,5.9GHz帯を活用したC-V2Xがあり,現在世界的に検討されている.
2.1 協調型自動運転ユースケース
日本では,2015年にクルマの安全運転支援のために,700MHz帯(帯域幅9MHz)を活用したITS無線システム(以下,700MHz帯ITS)が世界に先駆けて実用化された[1].一方で,国際的には5.9GHz帯がITSバンドとして割り当てられ,帯域幅も米国では30MHzの活用が想定されるなど,日本と海外で周波数の割当て状況が異なっている.
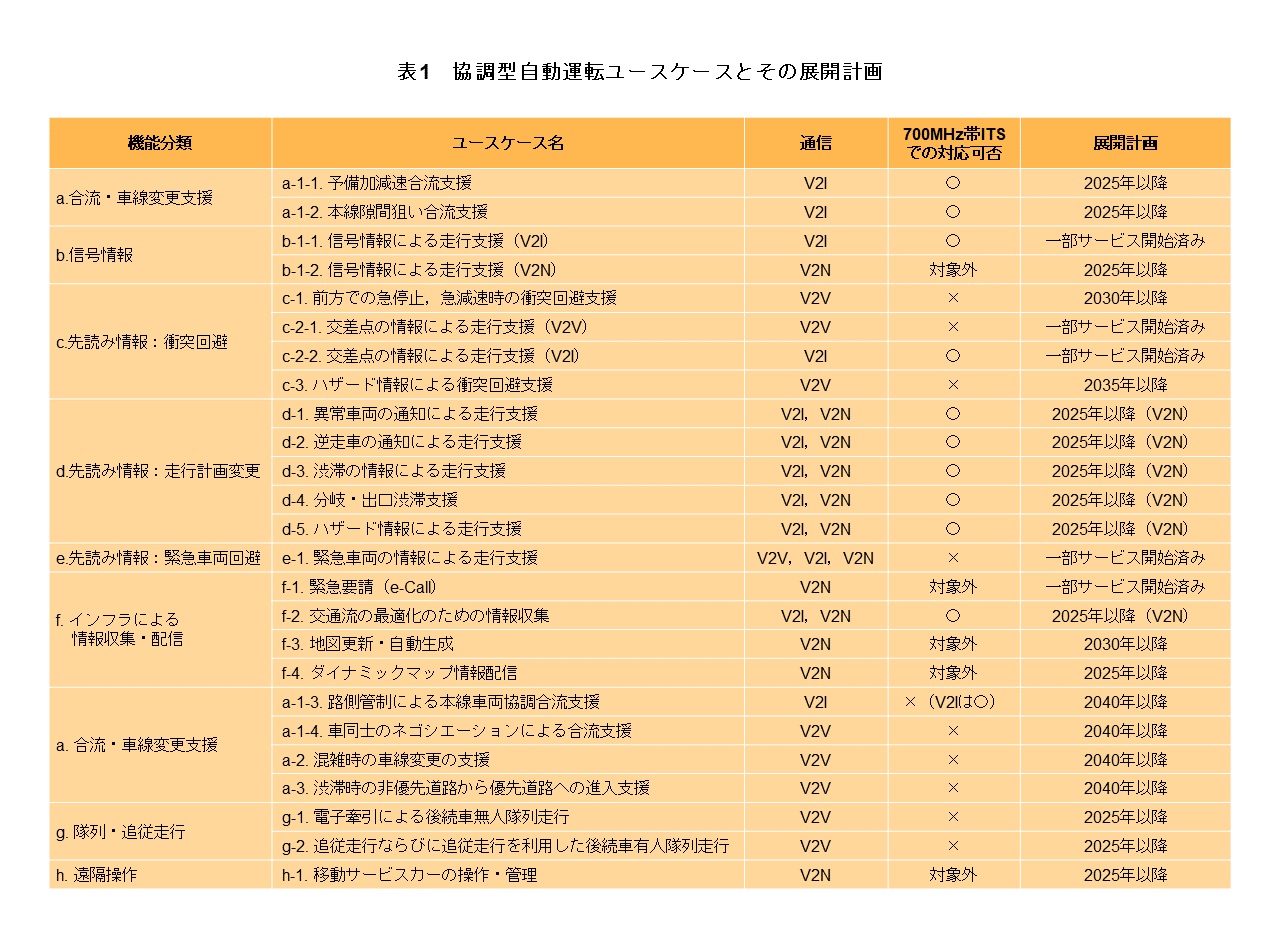
そのような中で,通信を活用した将来の協調型自動運転を見据えて,日本としての適切な通信方式と必要な周波数資源の検討を行うために,SIP-adus第2期において協調型自動運転ユースケースが明確化された[3].具体的には,カメラやレーダなどの車載センサによる自律型自動運転では実現不可能なユースケースを対象として,国内外の検討結果を集約・整理し,25個の協調型自動運転ユースケースが示された(表1)[3].協調型自動運転ユースケースはクルマ同士の通信(V2V:Vehicle to Vehicle),クルマと路側インフラとの通信(V2I:Vehicle to Infrastructure),クルマとセルラ網との通信(V2N:Vehicle to Network)による実現が想定されている.
さらに,ユースケースごとの通信要件やプロトコルが検討され[7],20個のV2VおよびV2Iユースケースに対して,既存通信方式である700MHz帯ITSでの対応可否に関する机上検討が行われた.その結果,特定のクルマ同士で連携しながら速度調整などを必要とするユースケース(表1のa-1-3,a-1-4,a-2,a-3)は,ブロードキャスト型の通信方式である700MHz帯ITSでの対応が困難であるため,新たな通信方式が必要とされ,またその他の対応不可ユースケースに関しては,通信要件のさらなる再整理が必要とされた.
上記評価結果に基づき,ユースケースの展開に向けたロードマップが作成され,700MHz帯ITSで対応可能なユースケースおよびセルラ網を活用するユースケースの多くは早期実現を見据えて2025年以降,特定のクルマ同士で連携しながら速度調整などを必要とするユースケースに関しては,新たな通信方式を具備した車載端末の普及率30%として2040年以降の実現が想定されている.
2.2 C-V2X
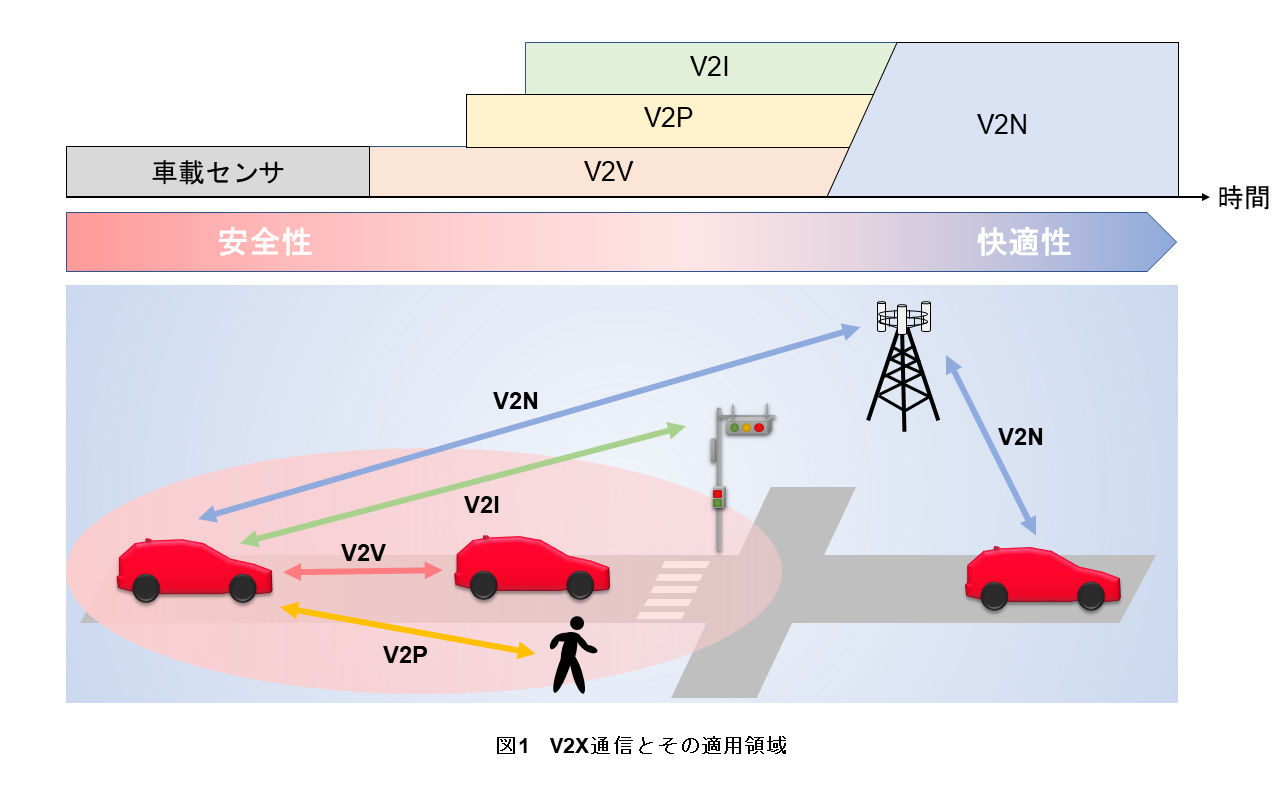
クルマとあらゆるものとの通信のことをV2Xと呼び,V2V,V2I,クルマと歩行者との通信(V2P:Vehicle to Pedestrian), V2Nで構成される(図1).V2V,V2I,V2P,およびV2Nは,それぞれ狭域での端末同士の低遅延な直接通信,セルラ網を経由した広域通信が想定され,ユースケースごとにそれぞれの通信形態を使い分けることで自動運転の安全性および快適性の向上が期待される.
V2Xの通信方式の1つとして,移動通信システムの国際標準化団体である3GPP(3rd Generation Partnership Project)によって標準化されたC-V2Xがある.C-V2Xでは,基地局経由通信であるUL/DL(UpLink/DownLink)に加えて,新たにV2X向けの端末間の直接通信(以下,V2Xサイドリンク)が仕様化され,V2Xのすべての通信形態がサポートされている.なお,3GPPにおける議論は5GAA(5G Automotive Association)*4などの団体との情報交換を行いながら進められている.
2017年に,3GPP Release 14にてLTEの通信技術に基づくLTE V2Xサイドリンクの仕様が策定された.LTE V2Xサイドリンクは,基本的な安全運転支援に関するアプリケーションを対象として,自車両の位置や速度などの車両情報の周期的なブロードキャストに最適化されており,基地局圏外でも通信可能である.その後の2020年に,Release 16にてNR V2Xサイドリンクが仕様化された.NR V2Xサイドリンクは,第5世代移動通信システム(5G)向けの新しい無線方式(NR(New Radio)に基づく通信技術であり,より高度なユースケースとして隊列走行,センサ情報共有,条件付/完全自動運転を主な対象としている.高信頼・低遅延・大容量通信が必要となるこれらのユースケースに対応するために,NR V2Xサイドリンクではブロードキャストに加えてグループキャスト/ユニキャストのサポート,復号結果のフィードバックに基づく再送制御(ブロードキャストは除く),サブキャリア*5間隔の拡大,MIMO(Multi Input Multi Output)伝送*6における2ストリーム*7送信などがサポートされている.
V2NのUL/DLに関しては,LTEおよびNRが利用可能である.NRの中でも,5G専用のコアネットワーク*8設備と5G基地局を活用することで,高速通信が実現可能な5G SA(Standalone)*9が商用化され,順次拡大することが見込まれる.また,通信事業者の閉域網内にクラウドサーバを構築して,セキュアかつ低遅延な通信を提供可能なMEC(Multi-access Edge Computing)*10の提供が開始されている.これらを適用することで,C-V2Xの高度化を図ることができる.
2.3 5.9GHz周波数割当て動向
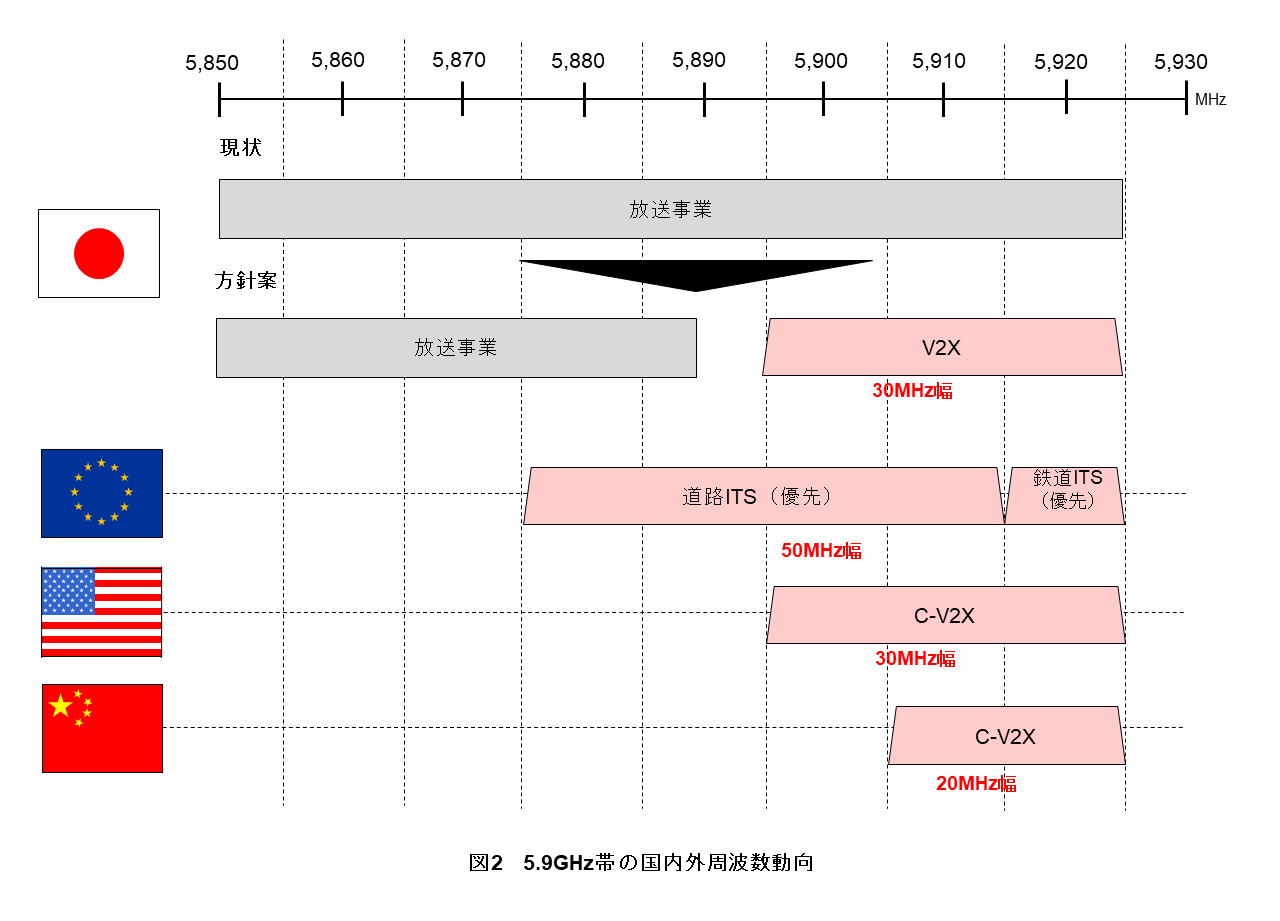
2019年にITU-R(International Telecommunication Union Radiocommunication Sector)*11の2019年世界無線通信会議(WRC-19:World Radiocommunication Conference-19)*12にて合意されたITS用途の周波数調和に関するITU-R 208勧告を踏まえて,欧米をはじめ世界的に5.9GHz帯へのV2Xシステムの導入が本格化している(図2)[6][8].
欧州では,2020年に5,875~5,925MHzの50MHz幅が安全関連のITS用に割り当てられた.ただし,帯域ごとに利用目的は規定されているが,通信方式は特定されていない.米国では,2020年に米国連邦通信委員会(FCC:Federal Communications Commission)*13より,既存ITSの70MHz幅(5,855~5,925MHz)のうち5,895~5,925MHzの30MHz幅をC-V2X方式へ割当変更とする旨が発表された.中国では2018年に5,905~5,925MHzの20MHz幅がC-V2Xに割り当てられ,実証実験が実施されている[9].
日本ではこれまで放送事業で5.9GHz帯が活用されていたため,安全運転支援用のITS無線システムには700MHz帯の9MHz幅が割り当てられ,2015年に700MHz帯V2Xシステムが実用化された[1].その後,ITU-R 208勧告の翌年(2020年)に総務省より公表された周波数再編アクションプラン[5]に,5.9GHz帯へのV2X通信導入に向けた技術的検討を行う旨が明記され,ルール作りに向けた検討が進められている.
電波を有効利用するための技術的検討を目的とした2020,2021年の技術試験事務では,5.9GHz帯におけるV2Xシステムと既存システムとの干渉検討が行われ,共用困難であることが示された[10][11].一方で,環境・制度整備の状況などを踏まえた自動運転の検討を目的とする2023年より開始された「自動運転時代の“次世代のITS通信”研究会」では,上記共用検討結果,車業界および放送業界などの構成員のコメントを踏まえ,5,895~5,925MHzの最大30MHz幅を目処に割当て検討する方向で整理された(図2)[6].
ドコモでは,今年度より5.9GHz帯V2Xの実現に向けて新方式による技術試験事務に参画し,技術的検討を行っている.また,「自動運転時代の“次世代ITS通信”研究会」に対して,整理すべき項目の1つであるV2V/V2IとV2Nの連携方策についての検討結果を報告し,議論の活性化に貢献している.[12]
- 5GAA:車関連企業とICT(Information and Communication Technology)企業などで構成される国際的なコネクテッドカーの検討団体.
- サブキャリア:複数の搬送波で情報ビットを並列伝送するマルチキャリア変調方式におけるそれぞれの搬送波.
- MIMO伝送:複数の送受信アンテナを用いて信号の空間多重を行い,通信品質および周波数利用効率の向上を実現する信号伝送技術.
- ストリーム:ネットワークに特定の同一の処理を要請するデータ列.
- コアネットワーク:通信事業者の交換機,加入者情報管理装置などで構成されるネットワーク.
- 5G SA:SA方式による5Gサービス.4Gの装置を流用したNSA(Non StandAlone)に対して,5G専用設備と5G基地局を組み合わせて提供される.
- MEC:ユーザに近い位置にサーバを設置したシステムのこと.通常サーバはインターネット上に設置されるが,MECサーバはキャリア網内に設置することで,遅延を減らすことができる.これにより,通信の応答速度(レスポンス)を大幅に向上させる.
- ITU-R:国際電気通信連合(ITU)のうち,無線通信に関する内容を担当する部門.主な活動として,無線通信規則に関する改正,勧告の作成,周波数割当てなどを行っている.
- 2019年世界無線通信会議(WRC-19):各周波数帯の利用方法,衛星軌道の利用方法,無線局の運用に関する各種規定,技術基準などをはじめとする国際的な電波秩序を規律する無線通信規則の改正を行うための会議で,各国主管庁およびITUに登録している事業者などの関係団体が出席し,通常3~4年ごとに開催される.
- 米国連邦通信委員会(FCC):アメリカにおいて通信および電波に関する規制を行う連邦通信委員会.
03. ドコモの取組み
-
3.1 柏の葉C-V2X実証実験環境
開く
ドコモでは,より安全で快適な車社会の実現に向けて,協調型自動運転ユースケースの実証実験およびパートナー企業との共創によるユースケース拡大を目的とし,実証実験環境の整備に取り組んでいる.実証実験環境は大別してテストコースおよびC-V2X実証基盤の2つから構成される.
テストコースは,千葉県柏市柏の葉の5G通信可能なエリアに設置された,公道を簡易に模擬した試験場である(図3).主に車両が走行可能な道路,信号機が設置された交差点,作業用のガレージなどで構成されており,実際の公道や遮蔽物を想定した多様な実証試験が可能である.また,周辺は柏の葉スマートシティ*14と呼ばれ,先進的な街づくりの一環として柏ITS推進協議会*15が組織されているなど,次世代ITSについても積極的な取組みがなされており,実証実験を行いやすい環境である.
C-V2X実証基盤は,V2V/V2IとV2Nを同時に制御可能な車載端末や専用アプリケーション内蔵のタブレット端末,docomo MEC*16上に構築したITSサーバから構成される.本基盤は,ITSサーバ上での簡易なルール設定のみでユースケースが実現できるとともに,必要に応じてITSサーバやアプリケーションのカスタマイズおよびその他機能のアドオンなどを行うことで,パートナー企業ごとに,独自に構築したセキュアな環境において多様なユースケースが実現可能である.また,直接通信(サイドリンク)の周波数は5.9GHz帯に対応しており,テストコースに加えて周辺の公道での試験も実施可能である.
本実証環境において,現在ドコモではC-V2Xを活用した取組みとして,車両走行時の電波伝搬測定からユースケースの実証実験,対外向けのイベントまで幅広く実施している.今後もさらに高度な試験環境を整備するとともに,ユースケース拡大を目的とした多様なパートナー企業との共創活性化をめざす.

3.2 遠隔操作と信号・物標情報配信連携
協調型自動運転技術を活用した移動サービスカー*17が自律走行困難な状況に陥った場合を想定して遠隔操作が検討されている[3].しかし,遠隔操作者が車載カメラからの映像により信号灯の色の識別や歩行者・車両などの認識を行う場合,太陽光や天候などの環境要因により車両の周辺状況把握が困難になる可能性がある.
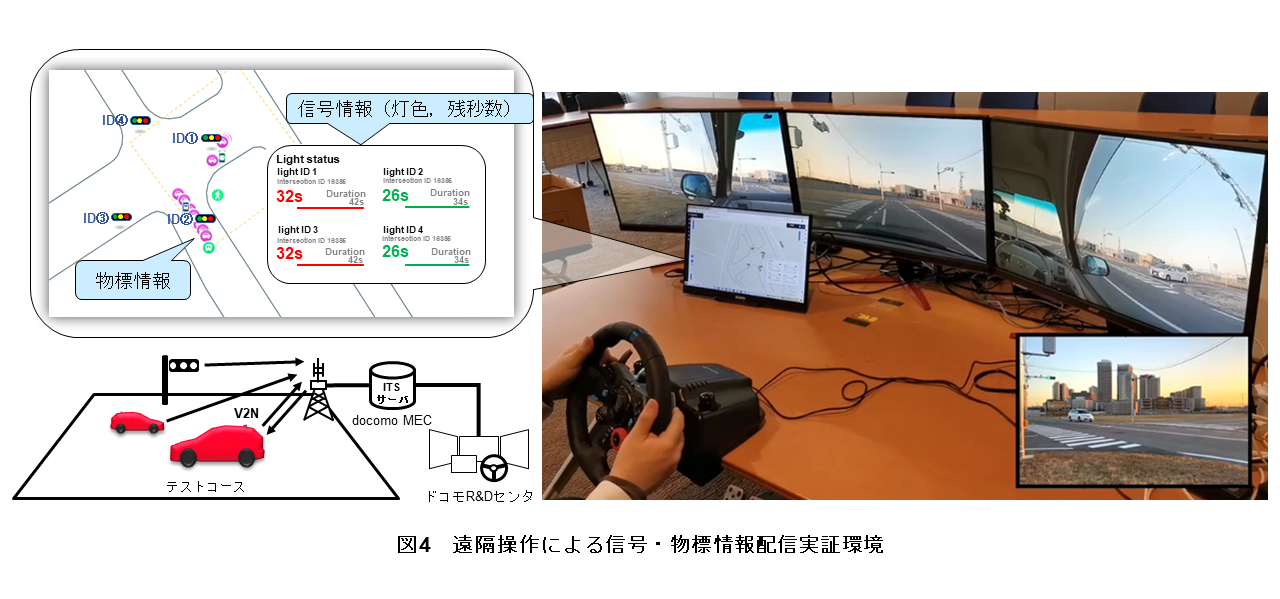
より安全な遠隔操作に向けて,遠隔操作者へ伝える操作対象車の周辺状況に関する情報として,周囲の物標*18情報と交差点の信号情報を配信する実証実験を,前述したテストコース-ドコモR&Dセンタ間で実施した.本実験で活用したシステムは,遠隔操作システムおよびITSサーバ上に構築した周辺状況配信システムから構成される.
遠隔操作システムは,操作対象車の車載カメラが撮影した映像をセルラ網で遠隔操作者へ伝送するとともに,遠隔操作者からのハンドル/アクセルなどの制御情報を操作対象車へ伝送することで,遠隔操作を実現している.周辺状況配信システムは,交差点の信号情報(灯色,残秒数),路側インフラおよび周辺の他車両のセンサ(LiDAR(Light Detection And Ranging)*19,カメラなど)が検知した物標情報をセルラ網経由でITSサーバに集約し,遠隔操作者へ配信する.
本実験でテストコース内の操作対象車をドコモR&Dセンタより遠隔操作したときの様子を図4に示す.同図のとおり,操作対象車からのカメラ映像の質に関係なく,周辺状況配信システムにより信号機が示す灯色を明確に識別できることを確認した.また,カメラ映像では把握不可能な信号灯色の切り替わりまでの残秒数を配信することで,急ブレーキを回避した円滑な走行が可能なことが確認できた.さらに,路側インフラや他車両が検知した物標情報を遠隔操作者に配信することで,操作対象車からは死角となる領域も把握できることを確認した.以上のとおり,周辺状況に関する情報配信の有効性を実証した.
遠隔操作に限らず,自律型自動運転車両においても車載センサを活用して信号灯の色の識別と物標検知を行うため,環境要因などによる識別・検知精度低下が懸念される.今後は自律型自動運転車両における配信の有効性を確認する.
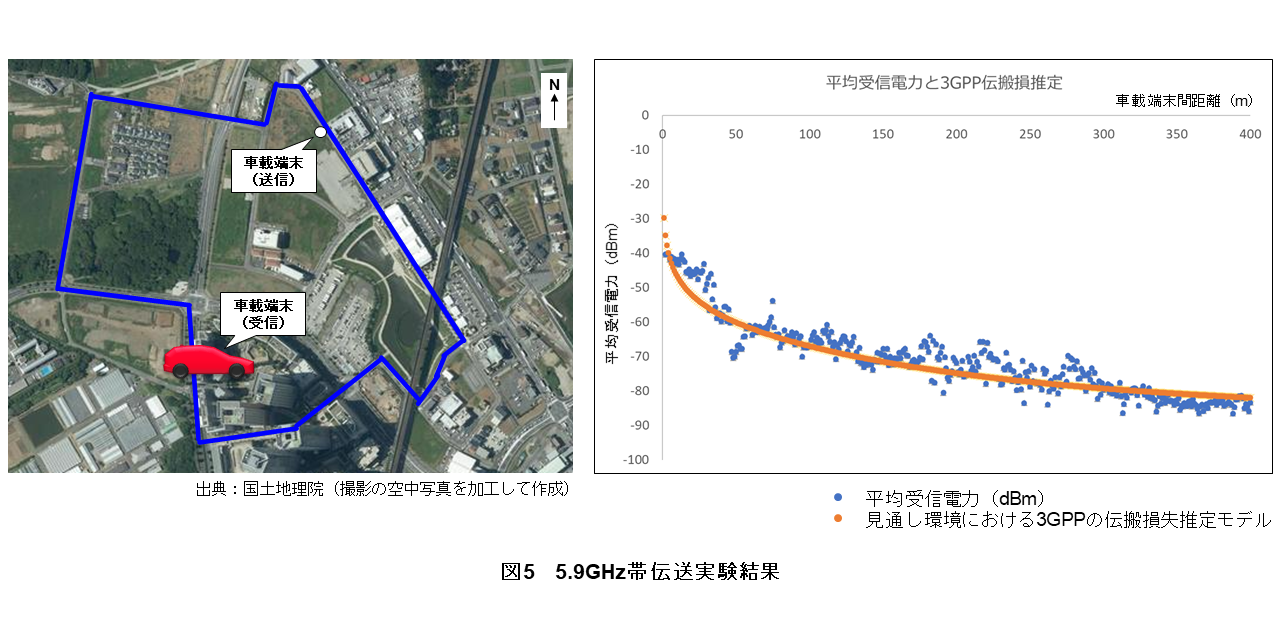
3.3 5.9GHz帯伝送試験
市街地でのC-V2Xの基礎特性を把握するために,前述したテストコースおよびその周辺にて,5.9GHz帯でのV2Vの伝搬性能を評価する実証実験を行った.本試験では送信端末をテストコース内に固定し,車両でテストコース周辺を周回して車載端末(受信側)にて受信電力測定を行った.
試験を実施した周回コースおよび見通し環境における,車載端末間距離と平均受信電力値の測定結果を3GPPの伝搬損失推定モデル[13]と比較したグラフを図5に示す.本試験では,受信電力が-95dBm以上であれば送信メッセージがほぼ復調できており,距離対平均受信電力は3GPPの伝搬損失推定モデルとほぼ同等となることを確認した.
今後は,大型車両や建物の遮蔽による受信電力の低減や,送信端末と受信端末双方が移動する環境下を考慮した無線特性評価を進める.
3.4 バーチャル空間でのC-V2X評価
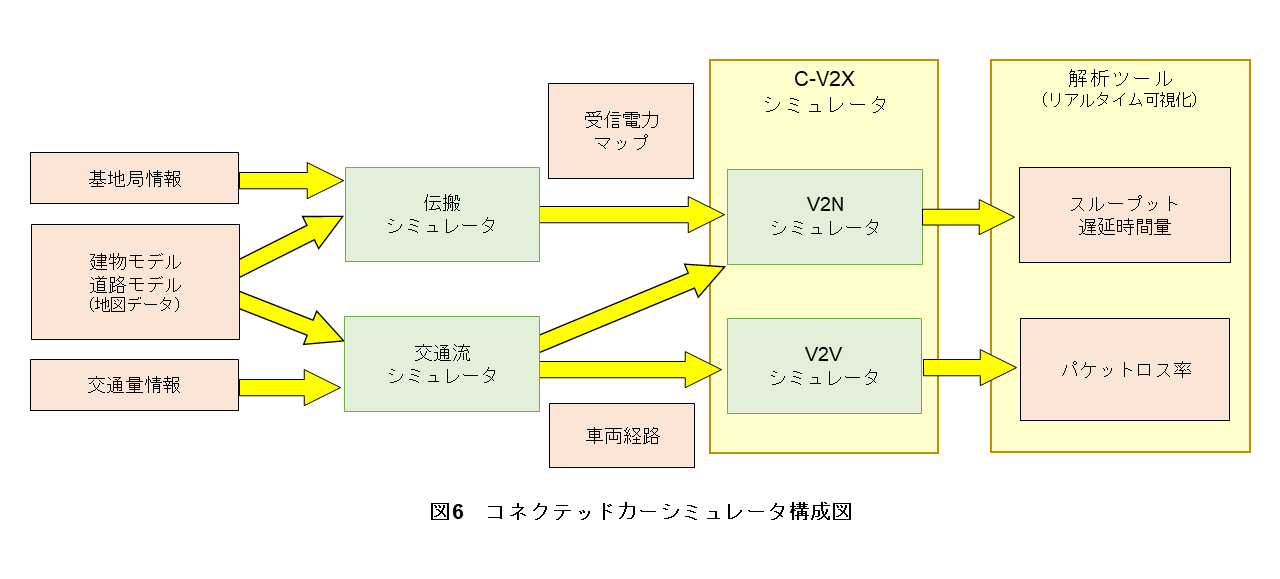
より安全・快適な車社会の実現に向けて,C-V2Xの可用性を示すことが業界全体の方式の導入・拡大に重要である.しかしながら,従来の可用性評価のために用いられてきた3GPP評価モデル[13]は局所的な簡易モデルであり,現実に即していない.そこで,バーチャル空間に現実と同じ街を再現し,実際の交通流データに合わせて数百台の車両を走行させてその通信性能を評価できるコネクテッドカーシミュレータを開発した.
コネクテッドカーシミュレータの構成を図6に示す.コネクテッドカーシミュレータは伝搬シミュレータ,交通流シミュレータ,およびV2NシミュレータとV2Vシミュレータを備えたC-V2Xシミュレータにより構成されている.コネクテッドカーシミュレータでは,地図データから抽出した建物モデルや道路モデルをバーチャル空間上に再現する.
伝搬シミュレータは,携帯電話基地局から道路上の各地点までの間の受信電力をレイトレース法*20にて計算する.
交通流シミュレータは,実測された道路上の混雑統計データによる車両分布に基づいてバーチャル空間内で車両走行を再現する.
V2Nシミュレータでは,携帯電話基地局 - 車両間において,接続先携帯電話基地局の選択やハンドオーバ*21,周波数選択などを時刻ごとに再現する.端末のデータ通信ではトラフィックモデルを模擬したデータを生成し,遅延時間量の計算では生成データの通信完了までの時間に加えてネットワーク遅延などを考慮する.
V2Vシミュレータでは車両間における直接通信を再現するが,各車両は時々刻々と位置を変えるため,車両間の位置関係も毎時異なる.そこで,V2Vシミュレータでは3GPP伝搬統計モデルを用いて,車両間に存在する建物や他車両の遮蔽などを考慮した車両間の受信電力を計算する.なお,直接通信では自律分散的に電波干渉を回避しながらパケットを周期送信する.また,パケットロス*22時の要因解析を行う.
V2NおよびV2VシミュレータによりC-V2Xのパケット通信を模擬し,スループット,遅延時間量,パケットロス率といった通信性能を算出可能である.
また,評価結果をリアルタイムに可視化する解析ツールを開発し,各道路上の通信性能を解析可能としている.評価の一例として市街地エリアにおける協調型自動運転ユースケースの可用性評価を実施している[14].
今後はコネクテッドカーシミュレータを用いて,協調型自動運転ユースケースの可用性を評価するだけでなく,新たなV2N - V2V連携ユースケースの創出やその評価に繋げる.
- 柏の葉スマートシティ:柏の葉エリアを中心とした次世代都市構想.公共,民間企業,大学が連携し,次世代の街づくりを推進している.
- 柏ITS推進協議会:最先端のITS技術を活用して柏地域の都市課題を解決することを目的として,2009年に設立された,行政機関や民間企業などからなる団体.2023年現在,ドコモも一般会員として所属している.
- docomo MEC:ドコモが提供する5Gの特長を最大限活用できるMECサービス.
- 移動サービスカー:シャトルバスや路線バスなど利用者に移動サービスを提供する車両.
- 物標:周辺の歩行者や車両など,カメラやセンサで検出する対象となる物.
- LiDAR:近赤外光や可視光を使って対象物に光を照射し,その反射光を光センサでとらえ距離を測定するリモートセンシング方式.
- レイトレース法:送信点から複数のレイ(光線)を放射し,地形や建物に対する各レイの反射や回折を模擬して,ある受信点まで到達したレイを合成して電波伝搬特性を解析する手法.
- ハンドオーバ:端末のエリア移動に伴って接続先基地局を切り替えること.
- パケットロス:情報誤りの発生や輻輳などにより,誤りのないデータパケットが宛先に届かないこと.
04. あとがき
-
本稿では,SIP-adusの検討内容や国内外の5.9GHz帯周波数動向などについて ...
開く
本稿では,SIP-adusの検討内容や国内外の5.9GHz帯周波数動向などについて触れるとともに,ドコモのC-V2Xを活用した協調型自動運転に向けた取組みとして,柏の葉のC-V2X実証環境およびそれを活用した実証実験の内容,実環境を模擬したコネクテッドカーシミュレータについて解説した.今後はより安全・快適な車社会の実現に貢献するために,高度な協調型自動運転の実現に向けて,新たな通信方式であるNR V2X,およびV2V/V2IとV2Nを連携させたユースケース拡大に関する検討を加速させていく.また,協調型自動運転のさらなる高度化を見据えて,第6世代移動通信システム(6G)に対応したC-V2Xの検討を進めていく.
-
文献
開く
- [1] 総務省 Connected Car社会の実現に向けた研究会:“Connected Car社会の実現に向けて,”Jul. 2017.
- [2] 内閣府:“SIP adus.”
https://www.sip-adus.go.jp/
- [3] SIP自動運転 システム実用化WG 協調型自動運転通信方式検討TF:“SIP協調型自動運転ユースケース―2019年度協調型自動運転通信方式検討 TF 活動報告―,”Sep. 2020.
- [4] SIP café~自動運転~:“SIP第2期自動運転(システムとサービスの拡張)第2期最終成果報告書(2018~2022)が公開されました,”Dec. 2022.
- [5] 総務省:“周波数再編アクションプラン(令和2年度第2次改定版),”Nov. 2020.
- [6] 総務省:“自動運転時代のITS通信をめぐる現状など,” Feb. 2023.
- [7] ITS情報通信システム推進会議:“SIP協調型自動運転ユースケースに関する通信シナリオ/通信要件の検討資料 ITS FORUM RC-017 1.0版,”Jun. 2022.
https://itsforum.gr.jp/Public/J7Database/p70/ITS_FORUM_RC-017_v10.pdfPDF
- [8] ITS情報通信システム推進会議 セルラーシステムTG:“セルラー通信技術を用いたITS・自動運転の高度化に向けた課題調査報告書,”Jan. 2021.
https://itsforum.gr.jp/Public/J7Database/p66/Cellular_system_202101.pdfPDF
- [9] 5GAA:“C-V2X Pilot and Demonstration Areas in China,”Oct. 2022.
https://5gaa.org/content/uploads/2022/10/C-V2X-Pilot-and-Demonstration-Areas-in-China.pdfPDF
- [10] 総務省:“5.9GHz帯V2X用通信システムに関する技術的検討,”2020.
https://www.tele.soumu.go.jp/resource/j/fees/purpose/pdf/R2_TE07.pdfPDF
- [11] 総務省:“5.9GHz帯V2X用通信システムに関する技術的検討,”2021.
https://www.tele.soumu.go.jp/resource/j/fees/purpose/pdf/R3_TE03.pdfPDF
- [12] 総務省 自動運転時代の”次世代のITS通信”研究会,NTTドコモ:“NTTドコモのV2N,V2Xに向けた取り組み,”Mar. 2023.
- [13] 3GPP TS37.885 V15.3.0:“Study on evaluation methodology of new Vehicle-to-Everything (V2X) use cases for LTE and NR,”Jun. 2019.
- [14] 牧野 寿之,徳安 朋浩,丸小 倫己,井原 武:“V2Vを用いた協調型車線変更に関する通信性能評価,”信学会総合大会,A-13-11,p.116,Mar. 2023.

