
地域からのお知らせ(北海道)
「スマート農業技術の開発・実証プロジェクト」に関する実証実験を開始
~ICT技術を用いた中山間地におけるスマート農業の推進をめざす~
2021年6月7日
株式会社NTTドコモ北海道支社
有限会社 木樋桃源ファーム
有限会社 矢作農場
津別町農業協同組合
国立大学法人北見工業大学
株式会社NTTドコモ北海道支社(以下、ドコモ)と、有限会社木樋桃源ファーム(以下、木樋桃源ファーム)、有限会社矢作農場(以下、矢作農場)、津別町農業協同組合(以下、JAつべつ)、国立大学法人北見工業大学(以下、北見工大)は、「スマート農業技術の開発・実証プロジェクト」(以下、本プロジェクト)に関する実証実験(以下、本実証実験)を2021年6月7日(月曜)から木樋桃源ファームおよび矢作農場を実証フィールドとして開始しました。本実証実験では農地集約が困難で農作業の人手依存度が高い中山間地域※1において、ドローンおよびトラクターに搭載したカメラを用いた画像収集システムとAIによる画像認識システム、振動センサー付き端末、5Gを用いたスマートトラクタ―システム※2を用いることで、高収益作物栽培(てん菜や玉ねぎなど)のリモート化・省力化を図り、将来的に生産者の経営改善効果があるかを実証します。本実証実験による実証結果および経営改善効果については全国で類似の課題に直面する生産者への水平展開をめざします。
なお、本プロジェクトは、農林水産省の所管組織である国立研究開発法人農業・食品産業技術総合研究機構(以下、農研機構)より2021年3月に、ドコモを代表とする5者によるコンソーシアムが委託先として採択され取り組むものです。
1.実証実験期間
2021年6月7日(月曜)~2023年3月31日(予定)
2.実証実験実施場所
木樋桃源ファーム(北海道網走郡津別町字木樋62番地)
矢作農場(北海道網走郡津別町字岩富59番地)
3.実証実験内容
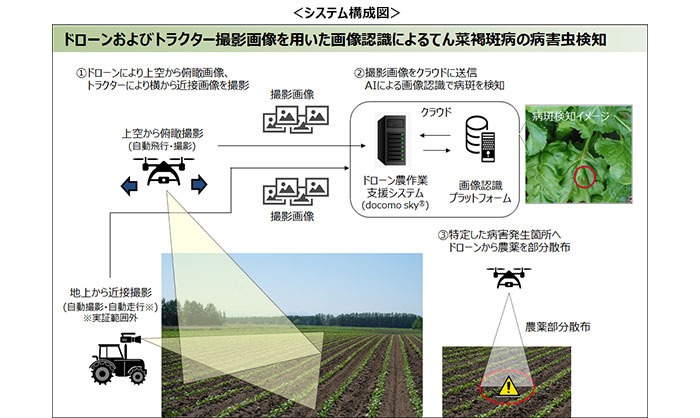
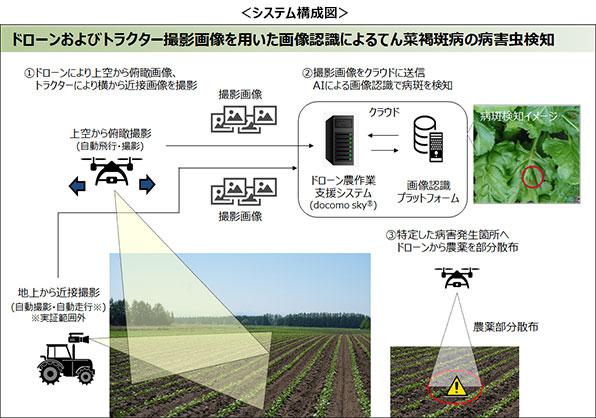
(1) ドローンおよびトラクター撮影画像を用いた画像認識によるてん菜褐斑病※3の病害虫検知
(2) 振動センサー付端末を用いた鳥獣害対策
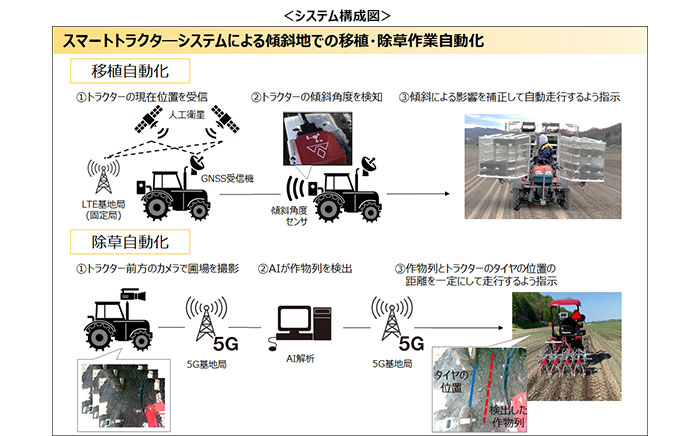
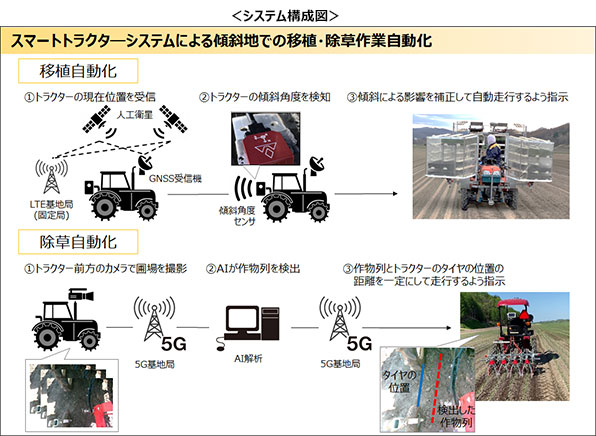
(3) スマートトラクターシステムを用いた傾斜地での移植・除草作業※4自動化
本実証実験に関する取り組み内容については、別紙を参照ください。
今後も5者は、本実証実験を通じて一次産業における各地域の課題解決をめざしてまいります。
- 農業地域類型区分のうち、中間農業地域と山間農業地域を合わせた地域を指しています。
- 無人で圃場内を自動走行できるトラクターシステム
- Cercospora beticolaという真菌による、生育期の葉や葉柄に常発する重要病害。北海道のてん菜栽培では7月から8月に多発し、根中糖分が大きく減少してしまう。
- 移植作業とは苗床や育苗ポットなどから、圃場や鉢など他の場所に植え替えること。除草作業とは雑草を取り除くこと。
<別紙>本実証実験概要
本実証実験では北海道の基幹産業である農業において、農地集約化が難しく、大型機械を活用した効率的な栽培が困難な中山間地域における農作業のリモート化・省力化という課題について、ICT技術を用いて解決し、生産者の経営改善を図ることを目的に取り組みます。本実証実験を通じて活用する技術の実用性、定量的効果、費用については、将来的に同様の課題を抱えた全国の農家への水平展開を本プロジェクトでは目的としていることから、システムの導入判断に必要な指標を広く明らかにし、現場で安全・確実に操作ができるわかりやすいUI(ユーザーインターフェイス)など、トータルのUX(ユーザーエクスペリエンス)観点における改良にも取り組んでまいります。
1.取り組み内容
本実証実験では3つのテーマについて取り組みます。
(1) ドローンおよびトラクター撮影画像を用いた画像認識によるてん菜褐斑病の病害虫検知(以下、テーマ①)
農作業におけるてん菜栽培において、症状が悪化すると葉を枯らす褐斑病は、生産者の収穫量の減少、病原菌の増殖につながることから、人手による定期的な監視および農薬散布を行っており、生産者稼働の増加および農薬コストの増加という課題を抱えております。
本実証実験は、褐斑病の発生状況の見回り作業を、ドローンの自動飛行機能などを含むドコモが独自開発した画像収集・分析システム(ドローン農作業支援システム)を利用し、ドローンにより収集する俯瞰的画像と、トラクター搭載カメラによる近接、高精細な画像をAIによる画像認識技術を活用することで、自動的に病斑を検知し、その効果を実証します。本実証実験により、わずか数ミリの病斑を短時間で広範囲に検知することができ、目視確認による病斑の見逃しを防ぐこと、人手による見回り作業時間を現状よりも50%以上削減することを期待できます。また、効率的な見回り作業の効率化だけではなく、農薬散布量や散布回数についても現状より15%程度削減できることもめざしております。
(2) 振動センサー付端末を用いた鳥獣害対策(以下、テーマ②)
北海道において、中山間地域はクマやシカなどによる作物への鳥獣被害が多いため、くくり罠に代表される罠の設置が有効ですが、生産者による設置場所の定期的な見回りや自治体・猟師との連携が必要であり、生産者の稼働が課題となっています。本実証実験では、鳥獣害対策用の罠に振動センサーと通信機器が一体となった装置「Kagatta®※5」と「わな検知クラウド※6」を活用し、動物が罠にかかるとその振動を自動検知してクラウドサーバ経由で生産者のスマートフォンなどへ通知し、効率的な鳥獣害対策を実現できるかを実証します。
本実証実験により、生産者・自治体・猟師の効率的な鳥獣害対策を実現し、現状の鳥獣被害額を20%減少させ、罠設置場所の見回り稼働を50%程度削減できることを期待できます。


(3) スマートトラクターシステムによる傾斜地での移植・除草作業自動化(以下、テーマ③)
トラクターは農業機械の中で最も汎用性が高く、年間を通して使用されるため、生産者が行う移植や防除、収穫などの農作業を自動的に行うことが可能になれば、生産者の負担を大きく削減し、農作業の効率化を実現することが期待されておりますが、今回の実証実験を行う中山間地においては、小型トラクターの自動操舵※7について傾斜の影響により自動走行の精度が低下するという課題があります。一般的にトラクターの自動操舵には高精度位置測位サービスを利用しますが、本実証実験では、「docomo IoT ⾼精度 GNSS※8位置情報サービス」に加え、傾斜によりトラクターの車輪が受ける力などの影響を補正する仕組みを用いることで、中山間地域でも高精度な自動操舵を可能とし、平地と同等の位置情報の誤差5cm以内での移植作業ができるかを実証します。また、AIを活用した画像認識とドコモが提供する5G通信により、トラクターが作物と雑草を区別して、作物を踏むことなく除草作業を自動化させることができるかも併せて実証します。本実証実験により、生産者の移植・除草作業の稼働時間を50%程度削減することを期待できます。
2.各者の役割
団体名
役割
株式会社NTTドコモ北海道支社
・実証プロジェクトの統括
・通信インフラ網の構築
・ドローン農作業支援システムおよび画像認識システムの提供
・Kagattaおよびわな検知クラウドの提供
有限会社 木樋桃源ファーム
・フィールドの提供(テーマ①・②)
・収量データ・農地データ等の収集、提供
有限会社 矢作農場
・フィールドの提供(テーマ③)
・収量データ・農地データ等の収集、提供
津別町農業協同組合
・実証プロジェクトの進行管理
国立大学法人 北見工業大学
・スマートトラクターシステムおよび画像解析技術の提供
3.今後のスケジュール(予定)
時期
2021年度
2022年度
テーマ①
・システム構築
・ドローンとトラクターの併用実証(6~9月)・システム改良
・ドローンとトラクターの併用実証(5~8月)
テーマ②
・システム構築
・罠の設置・実証(8~11月)・システム改良
・罠の設置・実証(6~9月)
テーマ③
・システム構築
・LTE実証(6~9月)・システム改良
・5G実証(4~9月)
- 株式会社コー・ワークスが提供する振動センサーとGPS内蔵通信端末を一体にした振動検知装置。
既存のくくり罠や箱罠に設置することで捕獲時の振動を検知し、装置の位置情報と合わせてクラウドシステムへ送信。 - Kagattaからの振動検知通知と位置情報を登録先へメール通知し、複数のKagattaの作動状況を地図上で把握し、罠ごとの捕獲実績の登録や自治体での閲覧をオンラインで実現できるシステム。
- ハンドルを自動制御し、設定された経路を自動走行すること。
- 衛星測位システムの総称で、複数の測位衛星から時刻情報つきの信号を受信し、地上での現在位置を計測するシステム。
記載された情報は、発表日現在のものです。仕様、サービス内容、お問い合わせ先などの内容は予告なしに変更されることがありますので、あらかじめご了承ください。

